2.1.5. 工具干涉领域设置
2.1.5. 工具干涉领域设置
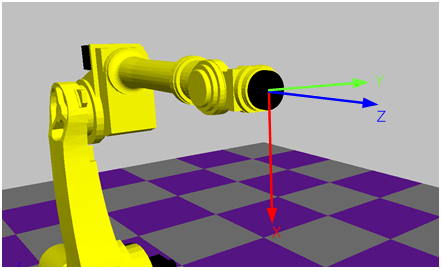
图2.1 凸缘坐标系
为了设置对于各个工具号码的工具干涉领域、以机器人凸缘坐标系为准制订。机器人在于基准姿势的话、凸缘坐标系与凸缘面保持垂直、往外出去的方向是Z、往下方向是X方向、机器人的左边方向是Y方向。
每个工具号码能够设置四个干涉领域。在机器人程序使用的工具号码一定要设置工具干涉领域。若没有设置此的话、不可进行干涉检测。
1) 伺服枪设置例子
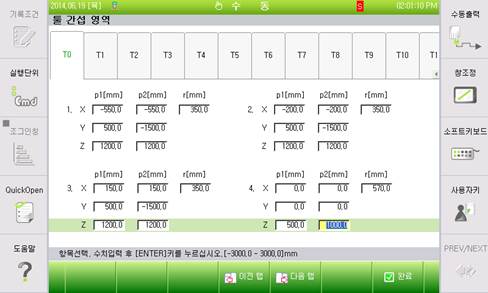
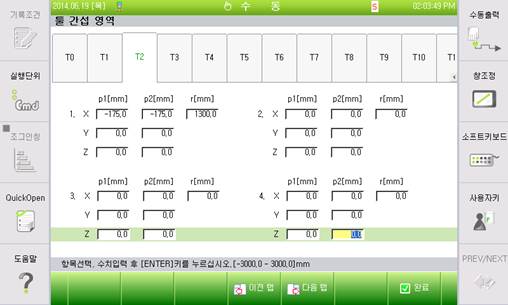
以工具干涉领域的设置为例、能够在工具凸缘(Tool Flange)面设置的坐标设置起点、终点和半径、设置工具干涉领域。每一个工具号码能够设置四个干涉领域。
凸缘坐标系方向和设置例子请参考如下图片。
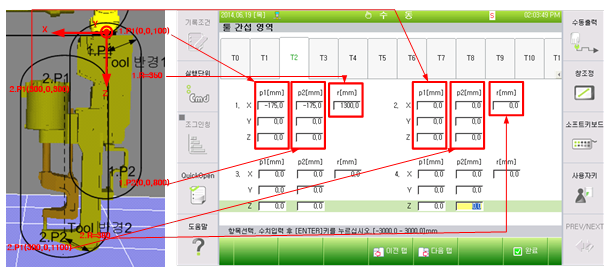
2) 吊架(hanger)设置的例子
l 只设置一个工具干涉设置领域
以凸缘的中心为准不对称的工具想要设置一个工具干涉领域的话、能够使用将工具形状的中心位置、中心位置和工具棱角的最大距离设置为半径的方法。
看看下面例子、以机器人坐标系为准X=-175、Y=-485、半径是在R1和R2中R1更大、所以设置成比1250稍微大的1300。若把半径设置成1300的话、考虑在圆筒的各面设置半球(hemi-sphere)的事实、Z的位置分别设置为P1=(-175、-485、500)、P2=(-175、-485、1000)。
但是正如上面把半径设置成大的话、不可回避设置成比工具实际样子更大。所以、有必要准确设置工具领域的话、应分成几个后制造模型。
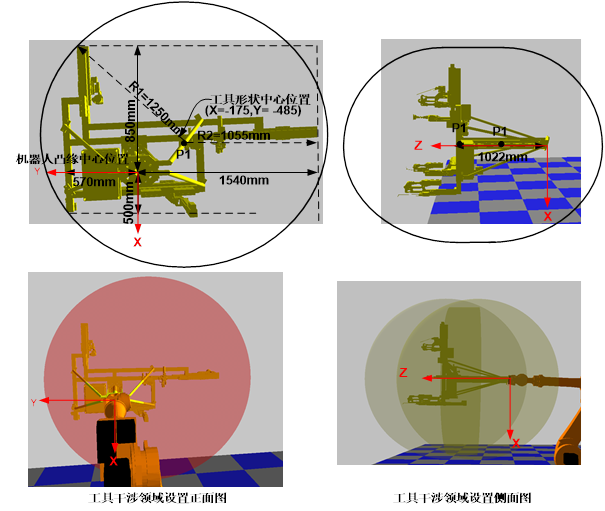
l 把工具干涉设置领域设置成四个的情况
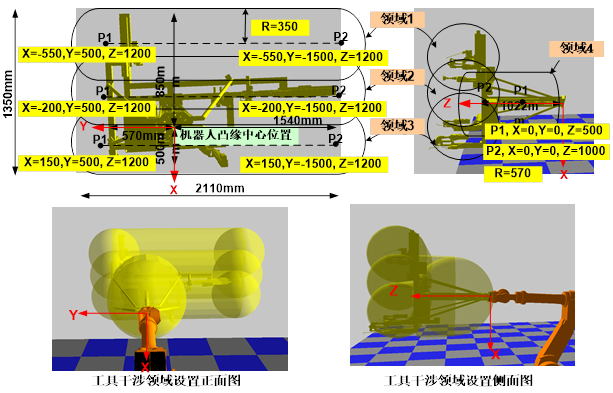
像吊架那样工具大的时候区分领域后设置的话能够防止把工具干涉领域设置成过大。正如下面例子那样、横2110mm、纵1350mm的工具的话、能够将纵领域分成三个后以350mm左右半径的3个圆筒领域1~3制造模型。最后将从凸缘到工具的offset设置成领域4的话能够如下设置。