2.3.1. 共同坐标设置概要
2.3.1. 共同坐标设置概要
要进行协作运动,就需要正确把握不同机器人之间的相对位置。机器人控制器以基坐标系为准计算工具末端位置,对于对象机器人的信息应附加注册。不同机器人之间的位置信息通过设置共同坐标系得出。
为了相互识别机器人1与机器人2的位置,设置共同坐标系。(图2.4)通过对不同机器人在工作区中相同的3个点位置进行示教设置共同坐标系。.
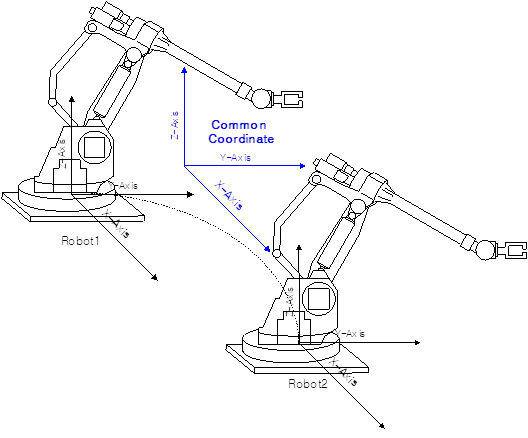
图 2.4 设置协作机器人之间的共同坐标系

l 设置共同坐标系之前,应先对机器人进行校准(Calibration)。