2.3.3. 行走轴系统
2.3.3. 行走轴系统
构成为协作控制所需的行走轴系统时,应将相同规格的行走轴尽量平行安装。
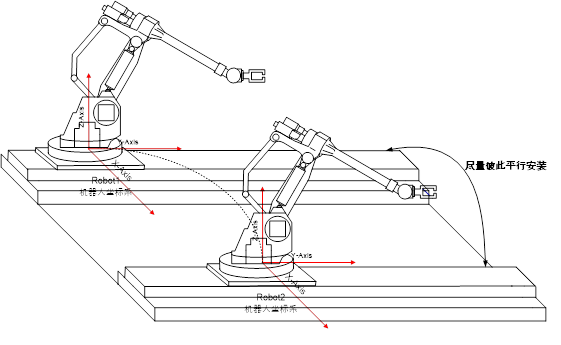
图 2.6 构成协作控制所需的行走轴系统

l 带有行走轴的系统应“任意”设置行走轴规格并对行走轴进行校准后才能使用。
l 协作机器人之间的行走轴应尽量平行安装。
l 行走轴移动时同步误差变大,可能是因为行走轴校准不正确所致。
l 对于行走轴校准功能的说明,请参考『Hi5a控制器操作说明书』。
l 行走轴校准应对主/从机器人进行。
构成为协作控制所需的行走轴系统时,应将相同规格的行走轴尽量平行安装。
图 2.6 构成协作控制所需的行走轴系统
l 带有行走轴的系统应“任意”设置行走轴规格并对行走轴进行校准后才能使用。
l 协作机器人之间的行走轴应尽量平行安装。
l 行走轴移动时同步误差变大,可能是因为行走轴校准不正确所致。
l 对于行走轴校准功能的说明,请参考『Hi5a控制器操作说明书』。
l 行走轴校准应对主/从机器人进行。