2.3.2. 2台以上机器人的共同坐标系
2.3.2. 2台以上机器人的共同坐标系
协作机器人的共同坐标系应对机器人之间的相同点进行示教,因此,应使所有协作机器人都指向相同的三个点。正因如此,机器人之间距离过大,则无法设置共同坐标系。此时,应通过另行制作工具(tool)对不同机器人之间相同点进行示教。
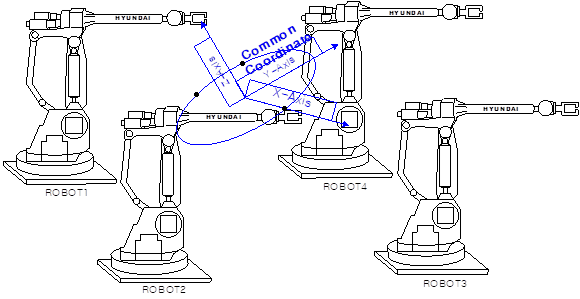
图 2.5 设置2台以上机器人的共同坐标系
协作机器人的共同坐标系应对机器人之间的相同点进行示教,因此,应使所有协作机器人都指向相同的三个点。正因如此,机器人之间距离过大,则无法设置共同坐标系。此时,应通过另行制作工具(tool)对不同机器人之间相同点进行示教。
图 2.5 设置2台以上机器人的共同坐标系