2.3.4. 共同坐标系设置
2.3.4. 共同坐标系设置
若未设置共同坐标系,则无法做到手动协作点动操作或协作再生。若设置好共同坐标系,建议通过点动操作协作运动,确认共同坐标设置正确后执行操作。
要设置共同坐标系,首先需要正确把握工具前端的位置。否则,可能造成机器人之间进行协作控制时出现位置同步误差。因此,必须先进行校准以正确设置机器人的原点及工具的位置。Hi5a控制器若无三维位置测定仪,则提供自动校准(『[F2]:系统』 → 『6:自动校准』 → 『1:轴原点及工具长度优化』)功能。 若带有三维位置测定仪,可进一步提高校准准确度。此时,请使用『9: 机器人及工具校准』功能。详情请参考『Hi5a控制器操作说明书』。
n 在有2台(ROBOT1、ROBOT2)机器人的环境下设置共同坐标系(例)
① 在ROBOT1、ROBOT2的控制器上选择用于设置共同坐标系的程序编号。
② 通过点动操作ROBOT1及ROBOT2,将三个点按顺次记录在步骤(STEP)1、2、3,以形成最大三角形。此时,记录位置应位于工作区中相同位置上,插值方式或速度都无所谓,但工具编号必须选择正确把握前端位置的工具。
③ 在手动模式下,选择『[F2]:系统』 → 『6:自动校准』→『5:协作机器人共同坐标系设置』。
④ 在程序编号项目中输入用于设置共同坐标系的程序编号。
⑤ 按下『[F1]: 执行』键。执行结果显示从机器人基座上看的共同坐标系位置及姿势。
按下『[F7]: 完成』键即可完成设置。


图 2.7 不同机器人的共同坐标系设置程序
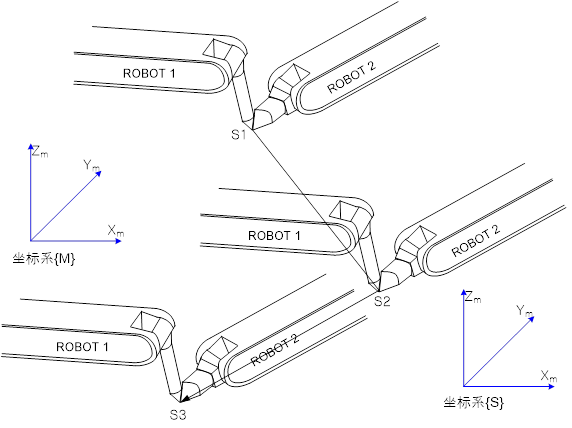
图 2.8 共同坐标系设置示教方法
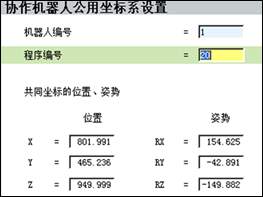
图 2.9 共同坐标系设置结果界面

l 用于设置共同坐标系的工具数据值,请输入正确的工具规格,或通过进行自动校准得出后使用。建议每个点记录机器人的相同姿势。
l 记录时请使所设置的三个点尽可能地形成最大三角形。若点与点之间的距离太小,或三个点几乎成一条直线,即会发生错误(error)。
l 在共同坐标系上Rx、Ry、Rz姿势的转换,与机器人坐标系之间的关系如下:
① 使自身机器人(编号2)坐标系(ref)绕X轴旋转γ。
② 使自身机器人(编号2)坐标系(ref)绕Y轴旋转β。
③ 使自身机器人(编号2)坐标系(ref)绕Z轴旋转α。
④ 使自身机器人(序号 2)的基坐标系分别以γ、β、α为准旋转的姿势便是共同坐标系在工作区上的姿势。

图 2.10 转换共同坐标系的姿势