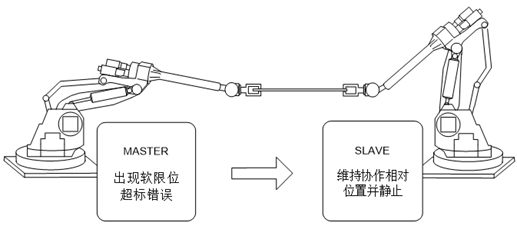
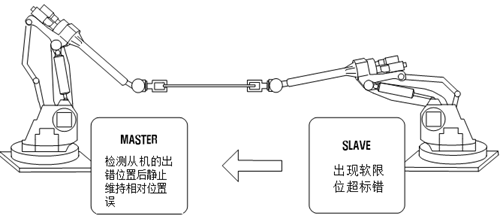
Hi5a 控制器功能协作控制3. 手动模式协作操作3.6. 检测协作机器人之间机械臂干涉及软极限(softlimit)3.6.1. 检测对象错误On this page3.6.1. 检测对象错误3.6.1. 检测对象错误 在协作运动过程中,对象机器人因臂干涉或软限位等错误而停止时,则会在维持对象位置的状态下停止。即使在从机上出现上述错误,主机也会停止,无法继续操作。 图 3.11 检测软限位错误