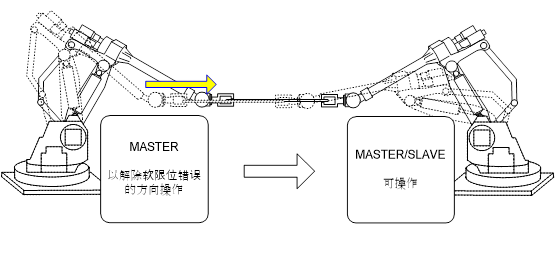
Hi5a 控制器功能协作控制3. 手动模式协作操作3.6. 检测协作机器人之间机械臂干涉及软极限(softlimit)3.6.2. 解除错误On this page3.6.2. 解除错误3.6.2. 解除错误 只要向不出错的方向按下主机器人的JOG键,即可解除错误状态。错误解除成功后,再向不出错的方向按下JOG键,即可重新进行操作。 图 3.12 解除软限位错误