4.1.2. COWORK函数的使用方法
4.1.2. COWORK函数的使用方法
(1) 就主机器人而言,位于COWORK ~ COWORK END区间的运动指令就是协作区间指令。从机则无法输入运动指令。
(2) 就从机器人而言,无法在协作区间使用一般的MOVE指令,而徐使用属于COWORK MOVE指令的CMOV指令。
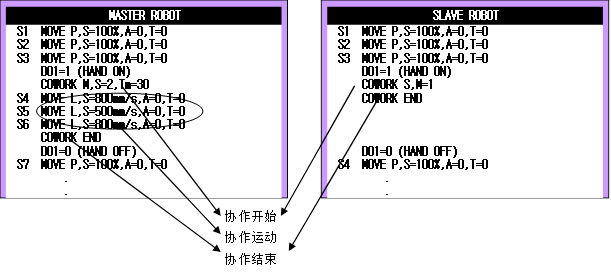
(3) 在由从机跟随主机运动的“搬运”(handling)应用领域,如下图所示,无需插入CMOV指令到从机中,也会在执行COWORK指令时维持主机与从机的相对位置而移动。
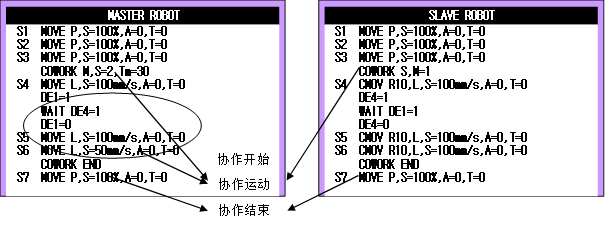
(4) 在从机上可插入CMOV指令,以使其以主机末端执行机构坐标系为准进行插值运动,CMOV的记录位置则以主机的工具末端执行机构坐标系为准。按如下图所示的方法进行示教时,就会在COWORK~COWORK END区间执行协作运动,而跟随主机运动的从机将沿着以主机末端执行机构坐标系为准记录的CMOV路径移动。

l 在协作运动结束的位置上必须插入COWORK END指令。
l 从机器人(Slave)无法在协作区间中插入MOVE指令, 主机器人(Master)则无法插入CMOV指令。