5.1. 协作再生概要
5.1. 协作再生概要
协作程序大体上可分为独立运动部分与协作运动部分。
独立运动部分是与普通的控制方式相同,进行个别运动的部分;协作运动部分则是由主机程序的位置决定从机运动的COWORK ~ COWORK END部分。
(1) 协作运动部分为COWORK ~ COWORK END,COWORK指令开始后,所有协作机器人将会等待(处于待机状态)至COWORK执行时为止。
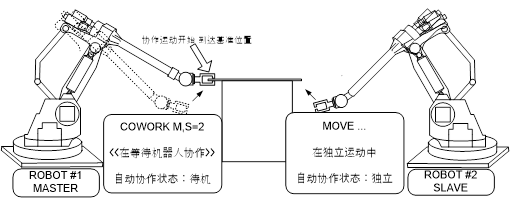
图 5.1 协作再生1
(2) 对象机器人都到达COWORK位置之时,就会开始协作运动。
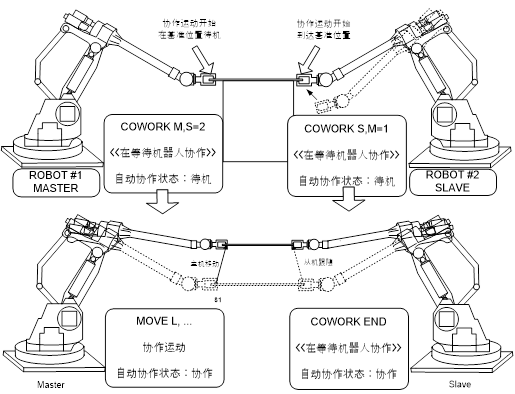
图 5.2 协作再生2
(3) 协作区间的运动都结束后,主机侧将会到达COWORK END,此时协作状态就会结束。
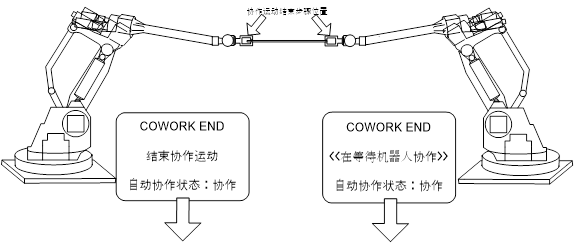
图 5.3 协作再生3
(4) 协作运动结束后,各自重新执行独立运动。
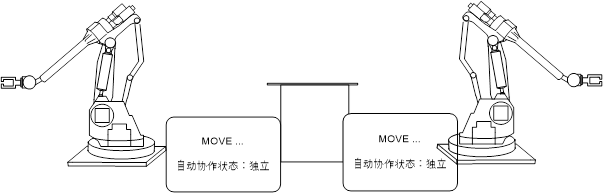
图 5.4 协作再生4