5.2. 在手动模式下确认程序
5.2. 在手动模式下确认程序
(1) 在手动模式下,主机器人将手动协作状态设置为I(Indiv.)或M(Master),从机器人则将手动协作状态设置为I(Indiv.)或S(Slave)。
(2) 先使运行准备置于On后,两侧都按下“步骤前进”键。
(3) 为了确认主机与从机的同步运动,将主机与从机的“步骤前进”键按住直到协作运动结束为止。

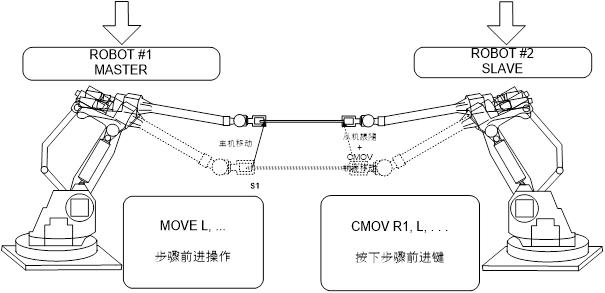
图 5.5 在手动模式下确认程序

l 从机处于CMOV记录模式时,无法在手动模式下与主机进行协作运动。
l 执行步骤前进/后退时,应在条件设置上将“步骤前进时执行函数”设置为“On”。
l 主机器人与从机器人只有在执行COWORK指令之时才检查执行位置,而不会在其他区间中使主机与从机的步骤位置同步化。因此,通过步骤前进/后退方式确认的主机与从机的相对位置,很有可能在自动模式再生运动上发生变化。
l 为了使主/从机器人的位置同步化,请使用COWORK WITH,SN=1的命令语句。