5.5. 机器人锁定功能(Robot Lock Playback)
5.5. 机器人锁定功能(Robot Lock Playback)
将『[F7]: 设置条件』 → 『5: 机器人Lock』设置为“有效”。

若选择“机器人Lock”,界面上方就会出现锁形图标。

若将主机器人的“机器人Lock”设置为“有效”后进行再生,从机将会执行协作运动,但主机器人则不会运动,轴数据显示屏将会改变。
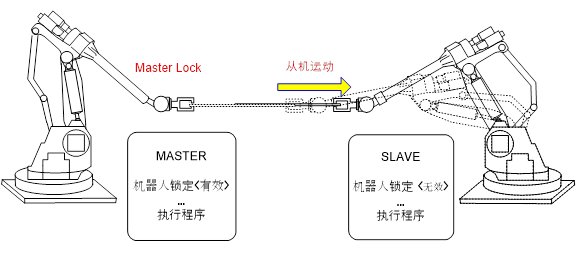
图 5.8 机器人Lock功能(Master Lock)
将从机器人的“机器人Lock”设置为“有效”,将 主机器人的“机器人Lock”设置为“无效”时,主机器人将会正常运行,从机器人将处于停止状态,只有监测数据才会移动。
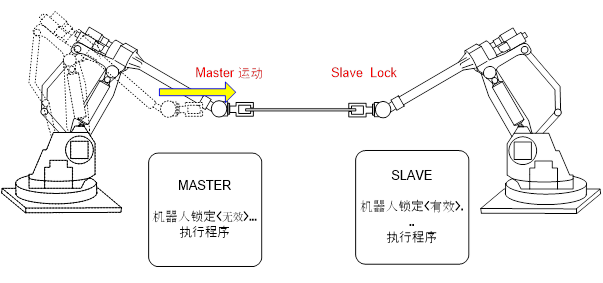
图 5.9 机器人Lock功能(Master Lock)
将主机与从机的“机器人Lock”都设置为“有效”时,将会在主机/从机都停止的状态下执行程序。
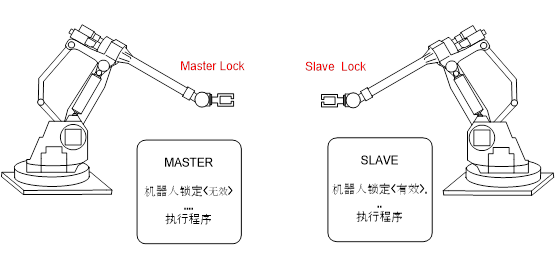
图 5.10 机器人Lock功能(Master, Slave Lock)

l 协作待机时间请适当设置。
l 将“机器人Lock”设置为“有效”的机器人不会运行,因此,请将其移动至不与其他机器人发生干涉的位置后执行程序。
l 将“机器人Lock”重新设置为“无效”后执行时,机器人位置与步骤位置不会对应,此时,请从头重新执行程序。