1.1. LVS焊接线跟踪功能介绍
1.1. LVS焊接线跟踪功能介绍
LVS是“Laser Vision Sensor”(激光视觉传感器)的简称。LVS功能用于在焊接时自动补偿工件位置及扭曲误差以跟踪焊接线。Hi5a当前支持的传感器包括:Oxford公司生产的OSL传感器、RENUE传感器、Riftek RF627传感器。
若使用LVS功能,如图1.1所示,因工件扭曲而造成示教轨迹不准时,就可沿着实际工件的焊接线来进行焊接。因此,不需经过变更而直接可以使用已示教的Job程序。
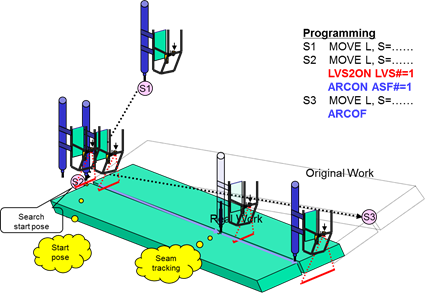
图 1.1 使用探测起点的LVS焊接线跟踪示例
图1.1显示使用起点探测功能的LVS焊接线跟踪示例。若探测起点,一边向TCP的+Tool X方向移动,一边寻找无效的焊接线。若发现无效的焊接线,就会自动移动到起点并存储补偿量。
* 注意:LVS2ON指令必须位于ARCON指令的上面。ARCOF指令语句必须存在于一个或多个MOVE语句的后面。