2.5. 硬件
2.5. 硬件

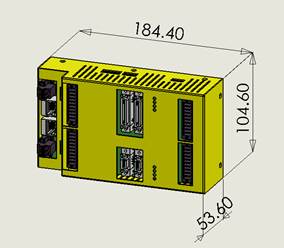
图 2.2 SafeSpace 模块与尺寸
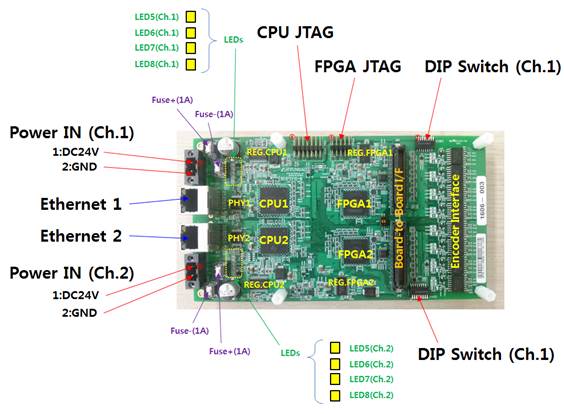
图 2.3 SafeSpace 内置主板
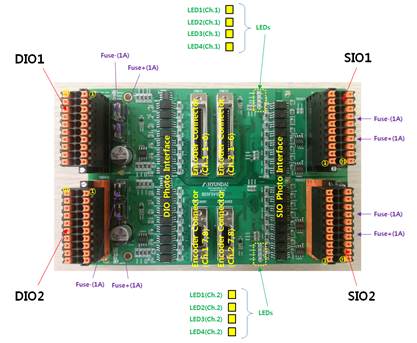
图 2.4 SafeSpace 内置上板
SafeSpace 应具有以下硬件功能:
SafeSpace 安全完整性为:PL=d (SIL 2),3 类,除了 STO 功能:PL=e (SIL 3),3 类。
HF.1:电源功能
该功能向 SafeSpace 模块提供控制电源。
通过配备管理程序的调压器,将 DC24V 输入电源分配为 DC5V、DC3.3V、DC1.2V、DC2.5V 等电源。
HF.2:监视功能
该功能监视 CPU 故障。采用基于时间窗口的监视脉冲。如果产生故障,将 CPU 重置,并关闭 FPGA 的 STO 输出以及 STO 缓冲。
HF.3:时钟功能
CPU、FPGA、以太网 PHY 的运行会用到时钟。时钟源来自一个石英晶体振荡器。通过 FPGA 中的 PLL,时钟源可以根据各个元件分为不同的时钟。
HF.4:CPU 功能
CPU 执行安全相关功能,并使模块工作。
HF.5:FPGA 功能
FPGA 包括用于通道联锁的双端口 RAM,用于获取机器人位置的数据串并转换部件,用于停止机器人运动和切断电机电源的STO 输出信号,以及连接外部安全 PLC 的通用数字输入/输出部件。
HF.6:编码器 I/F 功能 (RS485)
机器人操作手位置通过各个轴上的编码器转化为串行数据。然后串行数据通过 RS-485 线传输至机器人控制器。SafeSpace 的这种功能可以获取中间数据,然后输入 FPGA 进行串并转换。即,将 RS-485 差分信号变为单端 TTL 逻辑信号。
HF.7:STO 功能和通用 DIO
在发生故障时,该功能可以停止机器人运动,并切断电机电源。为实现这一动作,CPU 或 FPGA 向机器人控制器输出一个数字信号。然后通过测试脉冲监控信号来监控结果。
该功能的目标安全完整性级别为:PL=e (SIL 3),3 类。
此外,还有一些通用数字输入/输出。这种输入输出用于和外部安全 PLC 交换 IO 数据。其目标安全完整性级别为:PL=d (SIL 2),3 类。
HF.8:温度传感器功能
温度传感器用于监控模块温度。如果过热,则关闭所有功能,并通过 CPU 向机器人输出 STO 信号。
HF.9:以太网功能
该功能不属于安全功能,用于连接机器人控制器和 SafeSpace。SafeSpace 通常需要多个设置值来实现其功能。因此模块可以从机器人控制器获得这些数值,并通过以太网通信传输信息。
该部件由 CPU 的 EMAC 模块、以太网 PHY、以太网变压器和连接器构成。
