4.3. 控制测试功能
4.3. 控制测试功能
机器人位置应对机器人监控有效。控制测试功能用于评估机器人和外轴情况。如果当前位置偏离基准位置太多,机器人控制器就会出错,然后机器人停止运动。操作人员应维修机器人并予以校准。
一共有两种控制测试。
表 4‑8 控制测试类型
基于传感器的控制测试 (SBMT) | 无传感器控制测试 (SLMT) | |
基准位置 | 导电传感器位置 | 尖锐物体或标记设备位置 |
方法 | 通过程序自动执行 | 由操作人员手动执行 |
确认 | 传感器信号 | 安全用户 |
在控制测试菜单中,用户必须选择测试类型、测试时间和测试位置。SBMT 和 SLMT 配置存在一些通用项。
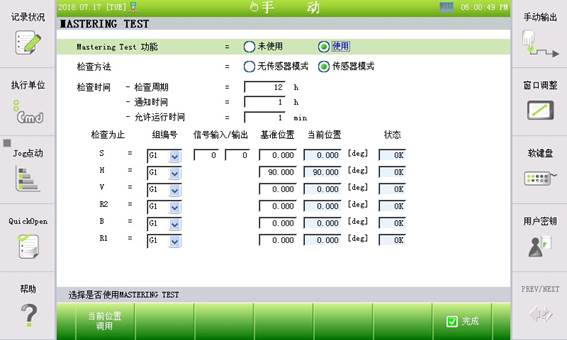
图 4.10 基于传感器的控制测试
表 4‑9 控制测试参数
测试类型 | 选择一个测试类型 | |
测试时间 | 测试周期 [h] | 测试周期时间 (12h ~720h) 默认设置:12h |
预警时间 [h] | 测试开始前告知具体时间 (1h~11h) 默认设置:1h | |
最大时限 [min] | 机器人因超时 (1min~60min) 停止后,自电机打开起的最长移动时间 默认设置:1min | |
测试位置 | 组 | 控制测试组编号 (1~3) |
I/O 信号 | - 输入/输出信号 | |
基准位置 [deg],[mm] | - 基准位置用于确认偏差 - 点动操作,然后按下 F1 键,读取当前位置以供参考 | |
当前位置 [deg],[mm] | 当前位置或各个轴 - 只读 | |
状态 | 关于当前位置与基准位置偏差的描述 - OK:关节位置在限定范围内 - NG:关节位置不在限定范围内 | |
若要保存配置参数,应输入 SafeSpace 密码。设置或变更参数以及执行 SLMT 时应采用密码保护。密码由 HRSafeSpace 设置。
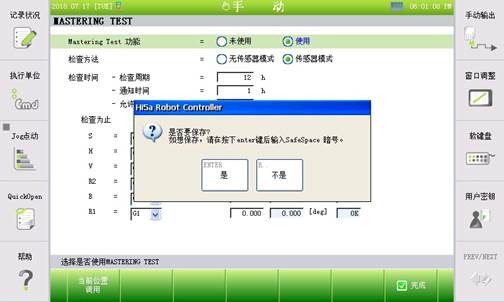
图 4.11 输入密码保存参数
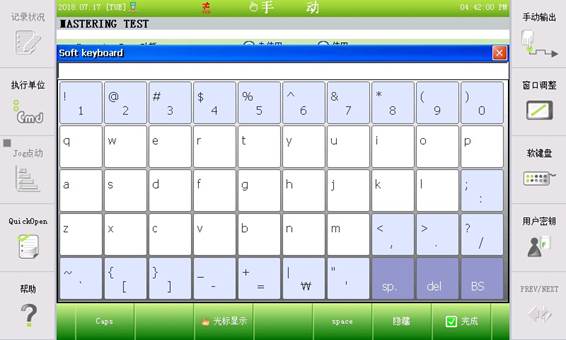
图 4.12 输入密码的软键盘