4.1.4. 各焊枪形式别焊枪搜索工作
4.1.4. 各焊枪形式别焊枪搜索工作
4.1.4.1.伺服焊枪
在伺服焊枪的焊枪搜索功能起初被设置时在总电极磨损量固定电极和移动电极磨损量各占50%,因此可单使用焊枪搜索1计算磨损量。若想分别计算固定电极及移动电极的磨损量,就请参考焊枪搜索2之说明。
如果『移动电极磨损量/全部磨损量(%)』设定值为“0”,就必需执行焊枪搜索 2动作;如果不是“0”,就可通过焊枪搜索1功能将全部磨损量按设定比分配。
(1) 焊枪搜索1
利用移动电极对固定电极进行加压检测电极的全部磨损量。

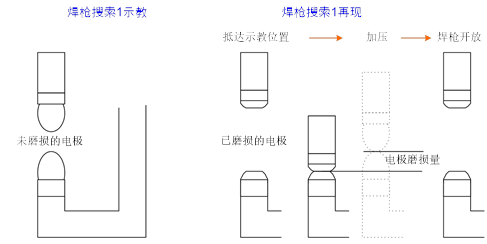
图 4.1 焊枪搜索 1
① 移动到步骤的记录位置。
② 利用移动电极对固定电极进行加压,直到到达设定加压力为止。
③ 感知加压一致,就检测电极的全部磨损量,执行开放动作。
电极的全部磨损量 = 加压一致感知位置 - 焊枪搜索1 标准位置
④ 打开到步骤的记录位置。
⑤ 如下图所示,只执行焊枪搜索1工作时,把测到的全部磨损量按移动电极和固定电极的比率分配磨损量。 (基本值为50:50)
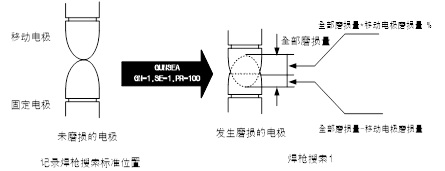
图 4.2 只通过焊枪搜索1计算磨损量
(2) 焊枪搜索 2
检测移动电极的磨损量。检测方法有利用加压力的方法和利用外部信号的方法。
l 利用加压力的方法
利用移动电极加压校正工架,检测移动电极的磨损量。
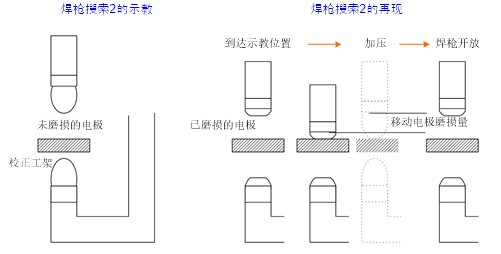
图 4.3 利用加压力进行的焊枪搜索 2
① 移动到步骤的记录位置。
② 利用移动电极加压搜索校正工架,直到到达设置加压力为止。
③ 感知加压一致,就检测移动电极磨损量,执行开放动作。
移动电极磨损量 = 加压一致感知位置 –加压力方式焊枪搜索 2标准位置
固定电极磨损量 = 通过焊枪搜索1感知的全部磨损量–移动电极磨损量
④ 打开后,移动电极及固定电极磨损量就会更新。
l 利用外部信号的方法
把移动电极移动到有感应器的位置,获得感应器输入信号后检测移动电极的磨损量。
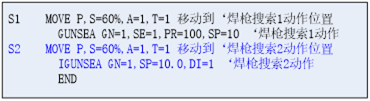
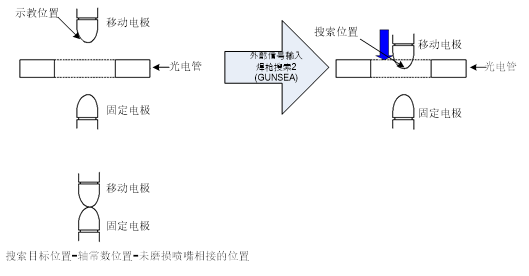
图 4.4 外部信号输入焊枪搜索2
① 移动到步骤的记录位置。
② 移动电极按搜索速度接近,切换光电管接点信号。
③ 感知光电管信号,就会检出移动电极磨损量,执行开放动作。
移动电极磨损量 = 外部信号感知位置 – 外部信号输入方式焊枪搜索2 标准位置
固定电极磨损量 = 利用焊枪搜索1感知的全部磨损量 - 移动电极磨损量
④ 打开后,移动电极及固定电极磨损量就会更新。
⑤
4.1.4.2.Eqless焊枪
Eqless焊枪只对固定电极磨损量进行管理,将通过焊枪搜索功能检测固定电极磨损量。

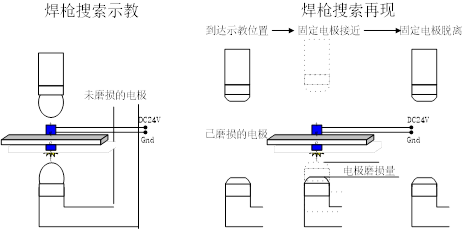
图 4.5 Eqless焊枪搜索
(1) 移动到步骤的记录位置。
(2) 固定电极按搜索速度接近,切换光电管接点信号。
(3) 光电管感知信号,就检测固定电极磨损量,执行开放动作。
固定电极磨损量 = 感应器感知位置 - 焊枪搜索记录位置
(4) 打开后,固定电极磨损量就会更新。