7.5.7. 单元设置
7.5.7. 单元设置
单元是指设置利用工作程序移动的轴的组合。在此消息框、可以用机构的组合设置各种单元。
机构是各轴的组合、因此单元也是各轴的组合。但不同的是、进行点动时使用机构、单元用于在程序记录步位置。在一般的情况下单元设置为单元#0。由于这包括所有机构、包括所有轴。在此情况下、记录机器人程序的话、记录所有轴的位置、播放时也所有轴移动到该位置。
如果想要编写只操作特定机构(轴)的程序、在此菜单分配单元后使用。
(1) 由于更改系统的单元将对控制器的运行产生极大影响、因此只有工程师才能进行设置和更改。
(2) 在手动模式的初始屏幕内、依次选择『[F2]:系统』→『5:复位』→『7:单元设置』。
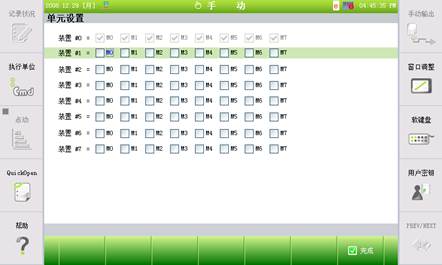
图7.89 单元设置
(3) 单元#0固定在所有机制内。
(4) 对于单元#1至#7、用户可选择多种机械。
(5) 在手动模式下记录程序的step时用户可以使用[单元]键选择单元号、并且如果在单元号被选择的状态下点击[记录]键、与相关单元相关的轴的位置会被保存。
(6) 如果通过光标更改或执行这一步、所记录的当前的单元号将自动更改为在此步上记录的单元号
(7) 从所记录的步骤按下[POS. MOD]键时、在此步上保存的单元位置将改变。

l 参考以下与单元有关的功能。
① 可更改姿势参数的单元。(例如:“P1.Unit=2”)
② 可指定姿势常数的单元。(例如:“P1=(12.00,13.00)UNIT2”)
③ 从PC上查看任务程序时、该单元将包括在隐藏姿态内。
(例如:“S3 MOVE, P,S=50%,A=0,T=0 (12.00,27.00)UNIT2”)
(单元为0时、UNIT0不包括在内。)
l 机器人坐标系插值(interpolation)功能
(1) 功能使用条件
① 在有运行轴的系统上设置不包括运行轴的单位、步骤的坐标系应设置为“机器人”。
② 区分处理包括走行轴的step(只支持基础坐标系插法)和不包括走行轴的step(只支持机器人坐标系插法)。
(没有运行轴的系统不存在相关事项。)
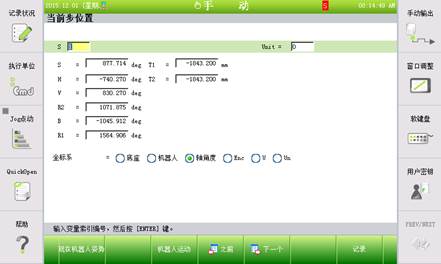
图 7.90 步骤的机器人坐标系设置
(2) 功能说明
① 步骤的单位设置为“机器人”单独
- 坐标系记录为“机器人”或“轴角度”
è 把直线插值(L)和弧形插值(C)当作机器人坐标系基准执行。
- 若坐标系记录为“基础”、播放时进行错误处理。
è 发生“E1483步的单元和坐标设置不相一致。”错误。
- 不可执行固定工具插值、传输带同步、位置调节器同步功能。
è发生“E1484单元设置错误 - 不可使用同步功能”的错误。
② 单位为“All运行轴+机器人”
- 坐标系记录为“基础”或“用户U、Un”
è L、C插值的话在指定的“基础坐标系”或“用户坐标系”进行插值。不支持机器人坐标系插值(L、C)。
- 但、单位为“运行轴+机器人”的话、所有运行轴包括在单位里面。因此、有多个运行轴的话应把所有运行轴包括在单位。不然的话、视为与“机器人”单独的情况相同。
(3) 功能的利用方法
① 使用“多重任务处理”功能或“独立执行指令”功能独立运转运行轴的时候只有用机器人坐标系进行L、C插值才能运转。
② 利用单位功能能够进行机器人坐标系P、L、C插值。
- 支持伺服焊枪、Eqless枪
- 支持移位功能
③ 能够直观、单纯地制订程序。
- 能够容易制订只把基础轴移位后执行相同工作的程序。
- 无论基础轴位置如何、能够容易制订要执行GUN搜索的程序。