6.5.1. 原点校准
6.5.1. 原点校准
(1) 先将控制器设为示教模式后,再将运行准备置于[ON]。
因出现异常而无法将运行准备置于[ON]时,请用制动器解除开关来调整机器人的基准位置。
(2) 请将各轴移动直至基本姿势为止后标尺(SCALE)的刻度成一致。
(3) 请将编码器复位。编码器复位方法请参考《6.5.2编码器复位》。
(4) 请对编码器进行补偿。请参考《控制器操作说明书7.5.4串行编码器复位》。
(5) 请确认机器人是否正常运行。
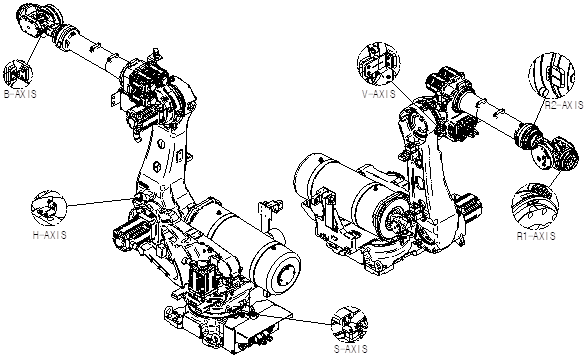
图 6.6原点设置方法
(1) 先将控制器设为示教模式后,再将运行准备置于[ON]。
因出现异常而无法将运行准备置于[ON]时,请用制动器解除开关来调整机器人的基准位置。
(2) 请将各轴移动直至基本姿势为止后标尺(SCALE)的刻度成一致。
(3) 请将编码器复位。编码器复位方法请参考《6.5.2编码器复位》。
(4) 请对编码器进行补偿。请参考《控制器操作说明书7.5.4串行编码器复位》。
(5) 请确认机器人是否正常运行。
图 6.6原点设置方法