6.5.3. 编码器补偿与选择
6.5.3. 编码器补偿与选择
l 对于机器人各轴的基准位置,需要对编码器数据进行补偿处理。
l 请参考控制器操作说明书中的《编码器补偿》。
[编码器补偿界面]
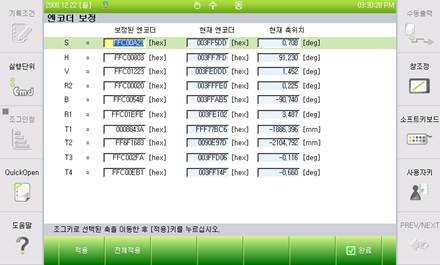
表6‑5复位后数据范围
轴 | 复位后数据范围 | 编码器每次旋转的脉冲数 |
全轴 | 0 ~ 8,191 | 8,192 |
(1) 先选择轴后,用[轴操作]键使轴移动到基准位置,并点击『[F1]:应用』。
(2) 用[轴操作]键来使机器人全轴移动到基准姿势后,点击『[F2]: 全部应用』键,即可批量对全轴进行编码器偏移量(offset)补偿。
(3) 要保存设置数据,请点击『[F7]: 完成』键。点击[ESC]键,不会保存经变更后的数据。
 注意事项
注意事项
更换电机后对编码器数据进行补偿时,请先将电源准备置于[ON]后,检查电源是否正常供应到电源。