2.4. 单独执行指令设置
2.4. 单独执行指令设置
使用本功能的条件由用户进行设置。为单独执行G1和G2的Tip dressing及焊枪搜索程序登录TaskStart 指令: 对P1如要移动到指定位置需登录MOVE指令。
TaskStart指令用来执行Multi Tasking、与之有关的具体内容请参阅Multi Tasking功能说明书。但单独执行指令本身就在Subtask 1运行、因此无法使用TaskStart SUB=1。
在[系统/应用参数/单独执行指令]画面进行如下设置。
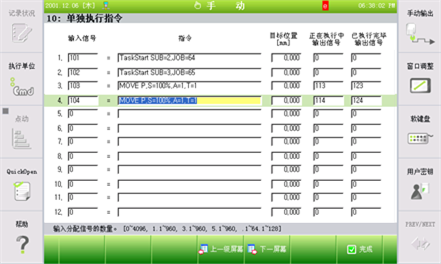
输入信号 | 运行相关指令时的输入信号编号 |
指令 | 拟要单独执行的指令 |
目标位置 | 移动到特定位置后执行指令时的目标位置 |
执行中输出信号 | 相关指令在执行中时的输出 |
执行完毕输出信号 | 相关指令完成执行时的输出 |
n TaskStart SUB=2、JOB=64
输入相应的输入信号(DI101)时 0064.JOB(G1的Tip dressing及焊枪搜索程序)与机器人程序一起被单独执行。
n MOVE P、S=100%、A=1、T=1
输入相应的输入信号(DI103)时以机器人作业程序和P1在MOVE指令所记录的位置和条件移动。但移动条件的插补类型会被自动调整为P、Accuracy被自动调整为0。