2.6.3.1. 伺服焊枪
2.6.3.1. 伺服焊枪
焊枪形式为伺服焊枪时,点焊功能的再现如下图所示。

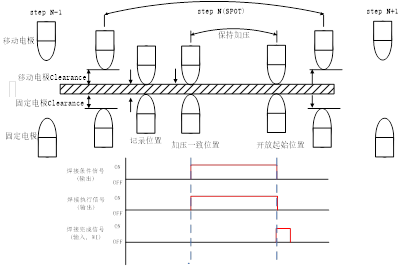
图2.7 伺服焊枪点焊的再现
(1) 在步骤N-1位置,移动电极从记录位置朝移动电极Clearance位置进行位移, 固定电极从记录位置朝固定电极Clearance进行位移。
(2) 根据机器人的均衡移动,固定电极移动到步骤的记录位置,移动电极按磨损距离移动到步骤的记录位置。
(3) 按照所设置的加压力, 移动电极执行加压动作。加压力一致后,就会在其位置与焊接条件信号一起输出焊接执行信号。
(4) 输入焊接完成信号(WI)后, 移动电极和固定电极会按各自的Clearance程度开放。
(5) 移动到下一步骤。