4.6.2. 定位器主机的示教与再生
4.6.2. 定位器主机的示教与再生
通过利用COWORK指令,对主机与从机进行示教。为了将主机侧定位器选定为主机,将从机侧设置为ID=1(定位器群组编号)。
在将定位器设置为主机的状态下(主机器人侧坐标系“同步S1”),记录从机位置。此时,记录位置将会记录于定位器末端执行机构坐标系。

为了使主机器人与定位器协作,按相同于现有定位器的方法以SMOV步骤进行示教。就从机器人而言,在将主机器人的定位器设置为主机的状态下(主机器人侧坐标系“同步S1”)记录步骤,就会被记录为反应主机ID的机器人编号。
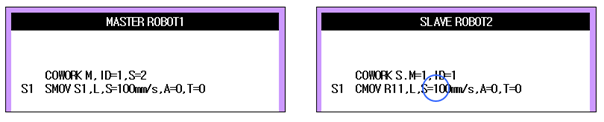
主机与定位器同步功能相同。从机被记录为R11。
按如上所述的方法对主机与从机进行示教,然后以COWORK END完成。


在手动模式下确认运动后,在自动模式下运行。


图 4.7 各机器人的定位器同步运动(模拟)

l 在无夹具协作控制下支持定位器群组1~2。在定位器点动(JOG)、CMOV上,应将定位器群组编号选为1或2。
l 在从机上,COWORK S,M=#1,ID=#2的设定值与CMOV R#1#2值不同时,就会出现『E1365 CMOV主机No. ID不正确』的错误。