1.2.1. 传感器安装及LVS焊接线跟踪的过程
1.2.1. 传感器安装及LVS焊接线跟踪的过程
若熟知LVS功能就能最大限度地减少可能在现场发生的问题。如图所示,在焊枪上安装支架来使传感器固定住。此时,若look ahead过大则会导致性能下降。α通常为10~20度。
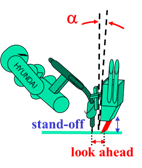
图 1.2 LVS传感器的安装
LVS传感器安装着可更换的保护盖,在产生飞溅时保护激光受光部及发光部。LVS跟踪在焊接过程中,反复执行如下图所示的过程:传感焊接线->计算目标点->队列(Queue)相关处理->计算位置及姿势误差->跟踪焊接线
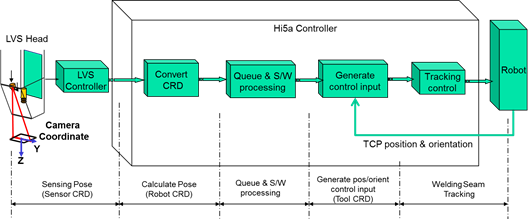
图 1.3 LVS跟踪的原理
队列(Queue)是一种存储器,主要存储这种序列的目标点。S/W processing意味着LVS功能所需要的多种处理,例如:探测起点、探测终点,防飞溅功能、监测功能、干伸长度补偿、跟踪量限制功能、电弧重试、电弧重启、
多道焊、seam finding等。
LVS功能不仅能跟踪位置,也能设置自动补偿姿势(方位)的选项。
此时,可设置Yaw、Pitch、Yaw/Pitch选项。
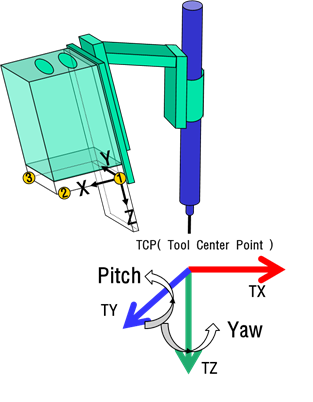
图 1.4 TCP-LVS传感器的校准
*安全须知:因为LVS生成增量指令,可能导致机器人沿着与已示教的路径不同的路径移动,因此,需要适当设置跟踪量限制功能,才能保障安全,同时,示教时,请勿在机器人附近进行作业。