5.3.2.1.2. 加压中移动焊枪(Pivot)
5.3.2.1.2. 加压中移动焊枪(Pivot)
伺服焊枪在进行点焊时,在加压过程中移动焊枪的功能。机器人在设定的移动时间按指定距离、速度、方向移动。该功能是机器人以工具坐标系为准移动的功能,因此伺服焊枪工具数据、磨损量、焊枪臂弯曲、示教姿势、机器人校准都有可能影响该性能。为了能有效使用该功能,应持续管理上述要素。
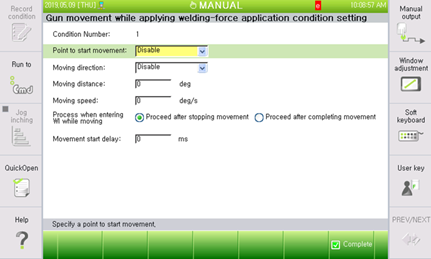
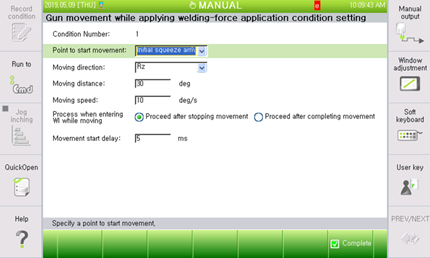
(1) 条件编号
显示多段加压及辅助条件的条件编号。
(2) 移动时点
点焊阶段分为[达到初始加压力]à[焊接执行输出]à[焊接完毕输入]后指定开始移动的时点。
(3) 移动方向
选择焊枪以工具坐标系为准移动的方向。
(4) 移动距离[deg]
设置需要移动的距离。
(5) 移送速度[deg/s]
设置移动时的速度。
(6) 移动时输入WI时的处理
机器人在移动过程中完成焊接时选择停止移动或完成移动后进行下一阶段。
(7) 移动开始延迟时间
达到移动时点后按延迟时间等待后再开始移动。