7.6.4. 负载估计功能
7.6.4. 负载估计功能
所谓的负荷推断功能是经过一定的运转自动求取附着在机器人前端的工具的物理值(质量、中心位置、惯性)的功能。为了正确安全的使用机器人、前端附着的工具的物理值必须输入。
对于控制器内部的机器人机体、已经注册各个链接的重量、重量中心和惯量(inertia)。但是由于按照用户目的安装工具、因此应由用户亲自输入。如果通过CAD数据显示工具的重量和重量中心位置的话、用户能够亲自输入此值。在“『[F2]:系统』→『3:机器人参数』→『1:工具数据』”能够输入工具重量(kg)、中心和惯量(inertia)。
因为机器人的控制是基于动态模型进行的、所以您需要机器人及其负载的动态参数。您可以在设计阶段从CAD中得到机器人数据、不过负载数据是变化的而且也是无法计算的。正是因此才需要自动估计功能。

图 7.95 工具数据设置画面
与工具数据相关的各项目如下。
n 重量 (单位: Kg): 显示安装在机器人末端的工具的总重量。
n 惯性 (单位: Kg∙m2)
指的是工具的惯性动量。惯性动量根据以重心为基准的x、y、 z轴圆周的质量分布加以确定、并且负荷的质量分布地越远离旋转轴会越大。
n 中心 (单位: mm)
是从机器人法兰面的中心到工具的重心位置的x、y、 z方向距离、单位使用mm。
n 工具数据坐标系:惯性和中心用如“图7.96工具数据”所示的与x、y、z轴方向相关的值表示。
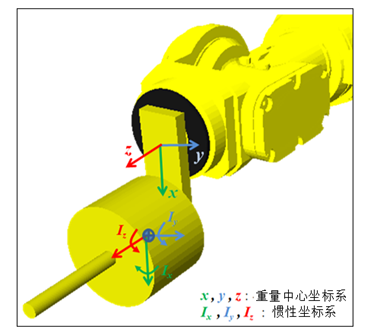
图 7.96 工具数据
但是在大部分的情况下难以从CAD数据获取工具的重量和重量中心信息。从中可见、在机器人控制器自动计算工具动态数据的功能就是负载估计功能。
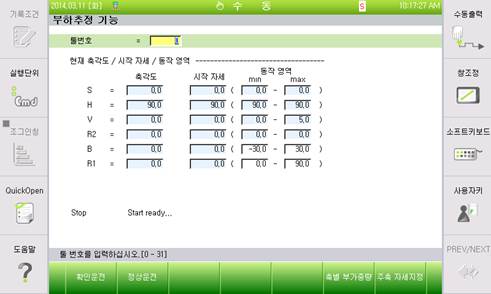
图 7.97 负荷推断功能画面
负荷推断功能的使用程序如下。
① 负荷推断功能的选择
② 各轴的附加重量输入
- 附加重量是指除安装在机器人前端的工具之外、焊接加工设备及焊接信号线等用户安装在机器人上的所有装置。
- 负荷重量功能只对安装在机器人上端的工具的物理值进行计算。
- 如果在存在附加重量的状态下实行负荷推断功能、则判定机器人上安装的所有重量物都位于前端。
- 因此、为了准确的推断负荷、应选择[F6:各轴附加重量]、输入各种的附加重量信息。
③ 主轴姿势指定
- 移动在负荷推断菜单上的机器人主轴、以便能够使机器人移动到可以安全的实行负荷推断动作的领域。
- 为了对机器人进行推断、使其移动到安全领域后选择 『[F7]: 位置指定』。
④ 腕轴动作领域输入
- 用户可以指定在负荷推断动作上使用的腕轴的动作领域、并且可以通过此在不会与周边设施或机器人主机发生干扰的运转领域实行负荷推断。
(※部分机器人不支持本功能。)
⑤ 确认运转
- 负荷推断动作时、为了确认与周边设施或机器人主机之间的干扰、选择[F1: 检查操作]、使机器人低速运转。
⑥ 工具编号输入及正常运转
- 设置使用的工具编号、选择『[F2]: 正常操作』以实行负荷推断。
⑦ 推断结果反映
- 确认推断结果、选择 『[F7]: 结束』、把负荷推断结果登录到确定的工具编号上。
详细内容请参考『负荷推断功能说明书』。

l 请注意根据腕轴运转领域条件无法进行推断。
l 在特定的机器人上可能无法指定腕轴运转领域条件