7.6.7. OLP的坐标系校准
7.6.7. OLP的坐标系校准
OLP(Off-Line Programming)在模拟环境下对作业进行计划以便用于使实际作业现场的追加的示教作业最小化。用OLP制作的程序理论上可以直接下载、代替实际作业。但是、在实际作业空间中存在机器人的准确度、机器人的设置位置的准确度、放置作业物的设置位置的准确度等各种误差。此类误差成为不能直接把在OLP上制作的程序应用于作业现场的利用。
因此、需要修正OLP上计算的位置和实际作业位置的作业。此类功能被称为‘OLP设置误差校准’。
本功能可以通过对与OLP上利用的CAD上的标准程序和位置相同的机器人进行示教以生成转换两坐标系之间的差异的关系来修正OLP设置误差。
本功能上提供的修正方法利用用户坐标系。用户通过用户坐标系对机器人程序进行示教。
如果输入OLP上生成的标准程序和根据用户的示教生成程序、两程序之间的转换值通过事先指定的用户坐标系的转换进行加算。结果、通过用户坐标系示教的程序的作业位置会被修正到与实际作业物的位置相符。
如下图7.102所示、OLP上放置有与U1相同的作业物、但在实际设置过程中如果设置与U1’相同、两坐标系会存在向X、Y、Z方向-50 mm、70 mm、0 mm、向Rx、Ry、Rz方向0 deg、0 deg、-15 deg的差异。本功能对替代U1的U1’进行计算从而弥补设置误差。
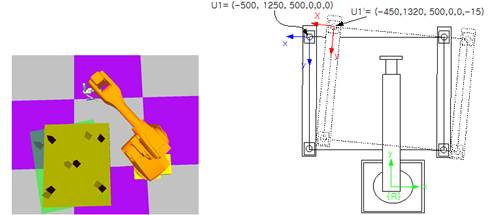
图 7.102 针对OLP的坐标系修正方法示例
Hi5a控制器支持10个用户坐标系。因此、可以设置每个作业物的各个用户坐标系、以便弥补设置误差。
详细内容请参考『针对OLP的坐标系校准用户说明书』。