6.4.2. 电机替换方法
6.4.2. 电机替换方法
(1) 把控制器转换为示教模式,使之设备处于运行准备[ON]状态。未处于运行准备[ON]时,应采取措施防止臂部降落,并确认是否正确固定。然后从(4)作业开始进行。
(2) 替换电机的轴应采取基本姿势。
(3) H轴: 请参考[图6.2]。
为了防止臂部降落,插入固定销或螺栓。
手腕轴(R2, B, R1) : 利用各轴SACLE及槽对准原点。
(4) 控制器电源处于[OFF]状态后关闭一次电源。
(5) 拆卸电机配线。
(6) 拆卸电机贴附螺丝,从机器人机体分开电机.
取出H、V轴电机时,应防止因电机轴连接齿轮而引起的油嘴受损。
(7) 请拆卸粘贴在电机轴的齿轮。
这时,请注意不要让电机轴受到强烈冲击。
(8) 在要组装的电机轴涂抹机油后,组装齿轮。
这时,应清洗、脱脂适用于连接电机轴与齿轮的螺丝,然后在螺丝部涂布粘合剂(Loctite 243),利用扭矩扳手按规定扭矩固定。并且,按对称方向慢慢按序固定螺丝。
(9) 在油嘴部涂抹少量润滑脂后,在齿轮齿面涂布适量机油, 然后把电机组装到机器人机体。贴附主轴电机时,油嘴被电机轴齿轮受损。
(10) 连接电机配线。
(11) 替换H、V轴电机后,再补充所漏出的润滑脂量。
(12) 重新设置替换电机轴的编码器。
 注意事项
注意事项
进行编码器修正之前,先在运行准备[ON]状态下将示教盒的启动开关按2~3秒钟,并确认电源是否被接通。
(13) 替换电机的轴之编码器请参考控制器操作说明书[编码器修正]进行修正。
(14) 拆卸H、V轴臂部防落固定销或螺栓。
(15) 确认机器人的工作是否有问题。
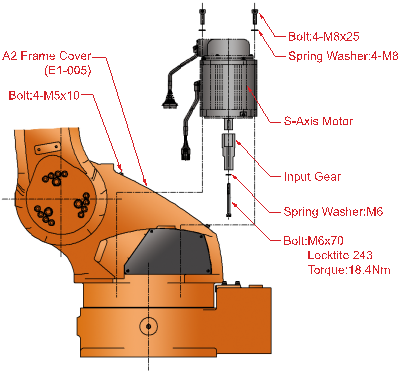
图 6.1 S轴电机/减速器分解图
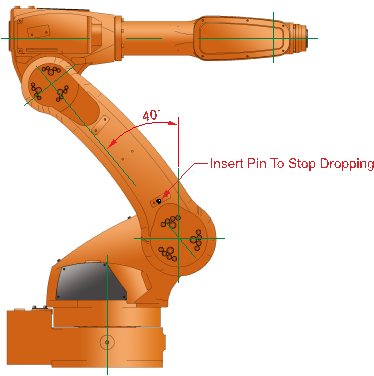
图 6.2 替换H轴电机时的机器人姿势
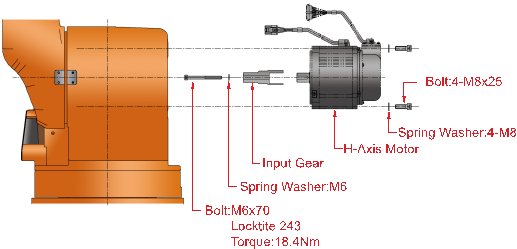
图6.3 替换H轴电机
| 注意
替换V轴电机时,必须将整个上臂部正确紧靠在定位停止销。否则,拆卸电机时,可能会导致上臂部旋转。 |

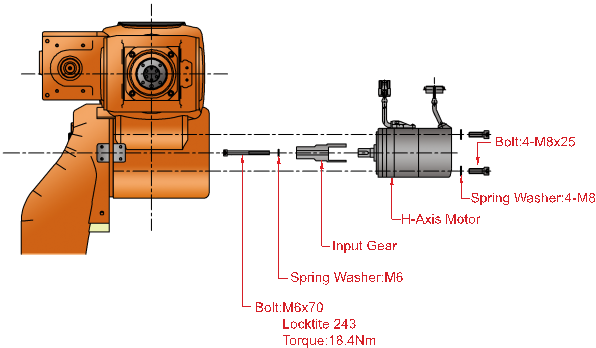
图6.4 V轴电机
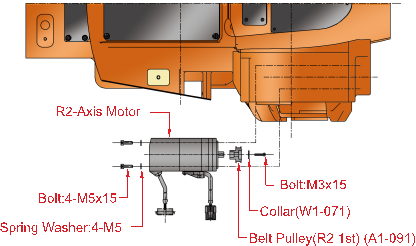
图6.5 R2轴电机
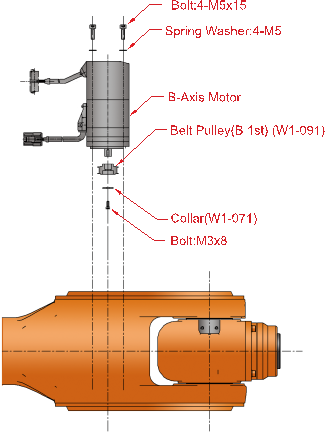
图6.6 B轴电机
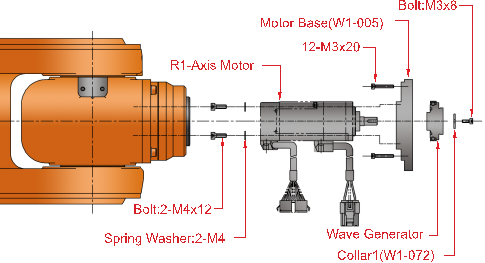
图6.7 R1轴电机