3.4.4. 操作方法
3.4.4. 操作方法
(1) 选择手动模式。
(2) 将机器人/伺服机构臂轴移动到开启开始位置、按下[记录]键、STEP即被记录。
(3) 输入HANDOPEN指令后、输入『开启偏移距离』。
(4) 输入方法为选择示教程序后、再选择『[F6]: 指令输入』→ 『[F6]:处理』 → 『[F7]: HANDOPEN』即可。
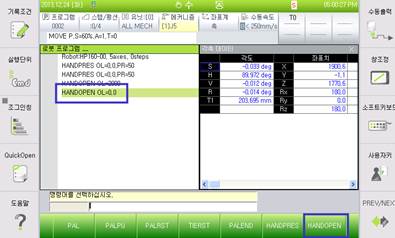
图 3.7 HANDOPEN 指令输入
(1) 选择手动模式。
(2) 将机器人/伺服机构臂轴移动到开启开始位置、按下[记录]键、STEP即被记录。
(3) 输入HANDOPEN指令后、输入『开启偏移距离』。
(4) 输入方法为选择示教程序后、再选择『[F6]: 指令输入』→ 『[F6]:处理』 → 『[F7]: HANDOPEN』即可。
图 3.7 HANDOPEN 指令输入