2.1.1. 伺服焊枪编码器修正
2.1.1. 伺服焊枪编码器修正
通常伺服焊枪在移动电极最大开放的状态下设置编码器原点。其理由是因替换伺服焊枪马达而变更编码器数据时,可通过机械方式简单修正编码器,使之位置一致。
伺服焊枪轴的修正步骤如下。
(1) 手动解除伺服焊枪轴的制动器后,使之移动电极处于最大开放状态。

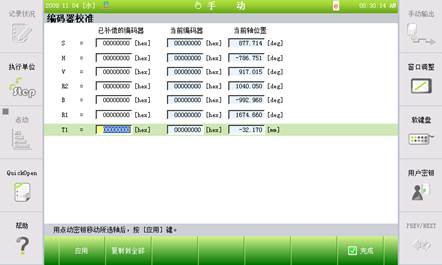
(2) 在『[F2]: 系统』→『3: 机器人参数』→『4: 编码器校准』利用鼠标选择伺服焊枪轴后,按『[F1]: 应用』按钮。当前编码器值成为“00400000”后按『[F7]: 完成』按钮。