2.1.3. 伺服焊枪软限制
2.1.3. 伺服焊枪软限制
通常伺服焊枪的软限制在移动电极最大开放、去除所有喷嘴的状态下,在最大接近位置设置最小值。
伺服焊枪轴的软限制设置步骤如下。
(1) 手动操作伺服焊枪,使之处于如下状态。


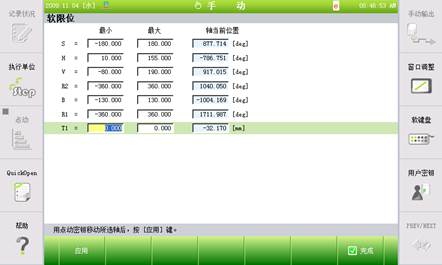
(2) 在『[F2]: 系统』→『3: 机器人参数』→『3: 软限位』用光标选择该伺服焊枪轴后,按『[F1]: 应用』按钮。正常显示后按『[F7]: 完成』按钮。
(3) 反复(1)和(2)步骤。
通常伺服焊枪的软限制在移动电极最大开放、去除所有喷嘴的状态下,在最大接近位置设置最小值。
伺服焊枪轴的软限制设置步骤如下。
(1) 手动操作伺服焊枪,使之处于如下状态。
(2) 在『[F2]: 系统』→『3: 机器人参数』→『3: 软限位』用光标选择该伺服焊枪轴后,按『[F1]: 应用』按钮。正常显示后按『[F7]: 完成』按钮。
(3) 反复(1)和(2)步骤。