2.10.3. 机器人坐标系
2.10.3. 机器人坐标系
当在 MANUAL(手动)模式中电机打开时、按示教盒的[ENABLE]开关。
按示教盒的坐标系统键、以使状态栏的坐标显示矩形。按下轴运行键时、机器人按以下方式运转。
要了解如何用轴操作键控制机器人的行动方向、请参考2.10.1 JOG操作键。
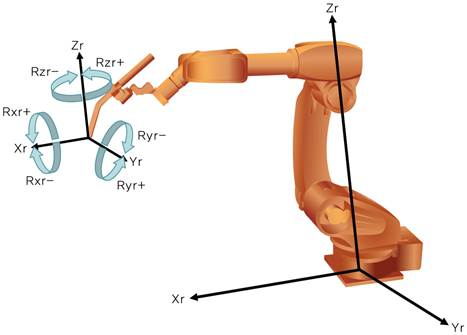
图 2.50 机器人坐标系

l 下图说明了确定机器人行进方向的简便方法、伸开拇指、食指和中指、互相成直角。 其余手指弯曲的方向为机器人坐标系的Y方向、拇指的行进方向为Z方向、中指的行进方向为X方向。 如果使用这一法则、您可以方便地了解机器人在机器人坐标系中的运行情况。
l 把右手大拇指放在旋转中心轴方向时用其他手指握住的方向就是旋转方向的+方向。
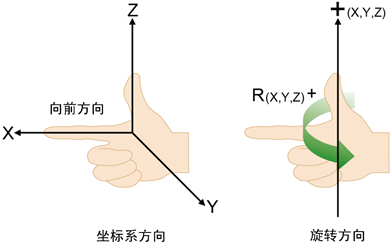
图 2.51 坐标系的方向和旋转方向