2.10.5. 工具坐标系
2.10.5. 工具坐标系
当在MANUAL(手动)模式中电机打开时、按示教盒的[ENABLE]开关。
按示教盒的坐标系统键、以使状态栏的坐标显示工具。按下轴运行键时、机器人按以下方式运转。
要了解如何用轴操作键控制机器人的行动方向、请参考2.10.1 JOG操作键。
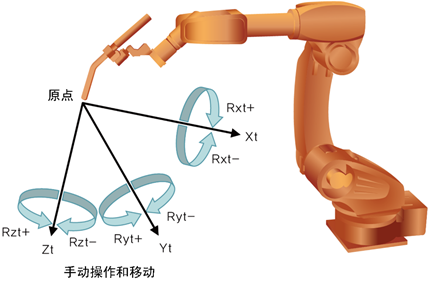
图 2.53 工具坐标系(用于焊炬附着)
下图表示焊炬没有附在机器人上的情况:
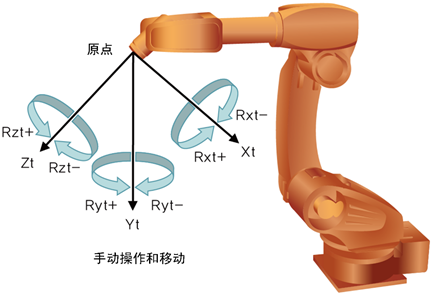
图2.54 工具坐标系(无工具)
当在MANUAL(手动)模式中电机打开时、按示教盒的[ENABLE]开关。
按示教盒的坐标系统键、以使状态栏的坐标显示工具。按下轴运行键时、机器人按以下方式运转。
要了解如何用轴操作键控制机器人的行动方向、请参考2.10.1 JOG操作键。
图 2.53 工具坐标系(用于焊炬附着)
下图表示焊炬没有附在机器人上的情况:
图2.54 工具坐标系(无工具)