8.2.3. 单元区域
8.2.3. 单元区域
让我们设置一下单元区域。为了便于设置,请按下“视图 -正视图”按钮,然后单击  按钮移动镜头。这在直观图中可能有所帮助,可以调准 HRSafeSpace 单元区域二维图以及 HRSafeSpace三维图中的 X、Y 方向。(注意,这是机器人坐标系,而不是世界坐标系。)在 HRSpace 的三维视图中,单元区域用青色多面体表示。
按钮移动镜头。这在直观图中可能有所帮助,可以调准 HRSafeSpace 单元区域二维图以及 HRSafeSpace三维图中的 X、Y 方向。(注意,这是机器人坐标系,而不是世界坐标系。)在 HRSpace 的三维视图中,单元区域用青色多面体表示。
由于许可 Z 轴区域为 0 ~ 3400mm,且立杆高度为 800mm,因此必须分别将 Zmin 和 Zmax 设为 -800、2600mm。由于围栏为五面体,因此需要输入五个顶点,然后根据计划将 Z 轴区域设为 0 ~ 3200mm。在单元区域页的列表控件中,顶点顺序并不重要。HRSafeSpace 会自动排列这些顶点。每次单击HRSafeSpace 的保存工具按钮时,当前设置都会应用到 HRSpace 的三维工作空间中。
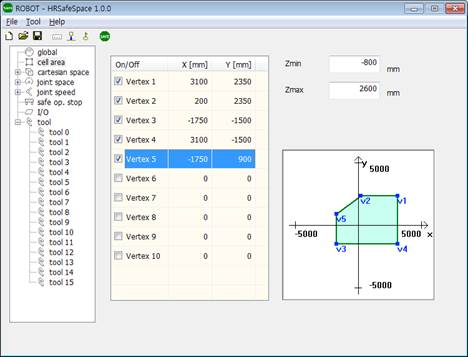
图 8.6 单元区域设置
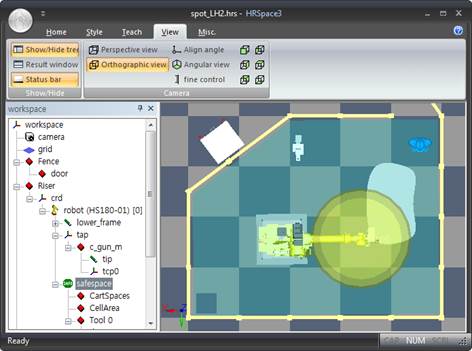
图 8.7 HRSpace 三维视图中的单元区域(平面图)
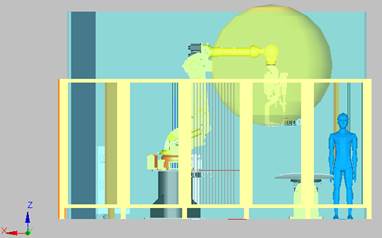
图 8.8 HRSpace 三维视图中的单元区域(立视图)