8.2.4. 笛卡尔空间
8.2.4. 笛卡尔空间
为了防止机器人碰到围栏中的支柱,可以将其作为保护空间。请按下图设置空间 1。我们只会用到全局 TCP 速度限制,因此可以忽略此页中的 TCP 速度设置。有时工人会进入围栏内,请将围栏门前方的空间作为第二保护空间。可通过安全 I/O 进行激活。(通过围栏门或激光传感器激活)
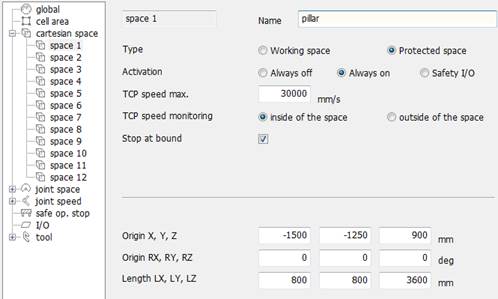
图 8.9 保护空间 - 支柱
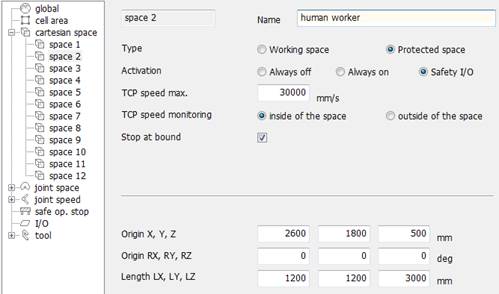
图 8.10 保护空间 - 工人
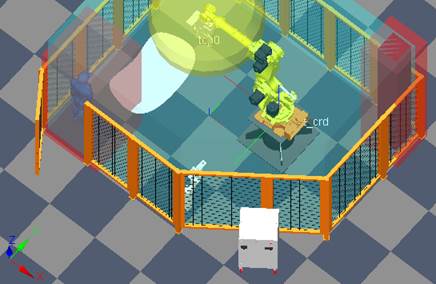
图 8.11 HRSpace 三维视图中的保护空间
为了防止机器人碰到围栏中的支柱,可以将其作为保护空间。请按下图设置空间 1。我们只会用到全局 TCP 速度限制,因此可以忽略此页中的 TCP 速度设置。有时工人会进入围栏内,请将围栏门前方的空间作为第二保护空间。可通过安全 I/O 进行激活。(通过围栏门或激光传感器激活)
图 8.9 保护空间 - 支柱
图 8.10 保护空间 - 工人
图 8.11 HRSpace 三维视图中的保护空间