8.2.6. 关节空间
8.2.6. 关节空间
在此例中,机器人的作用是对工件实施点焊,同时以间歇方式修整毛刺。因此,考虑到工件以及毛刺修整器的布局,机器人 S 轴可限为 -40 至 +95°。将空间 1 设为 S 轴的工作空间。(该关节空间设置未在 HRSpace 三维视图中示出。)

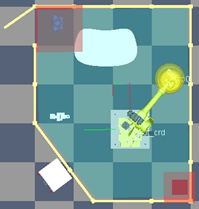
图 8.14 机器人在 S 轴值为 +95°(左侧)和 -45°(右侧)时的姿势
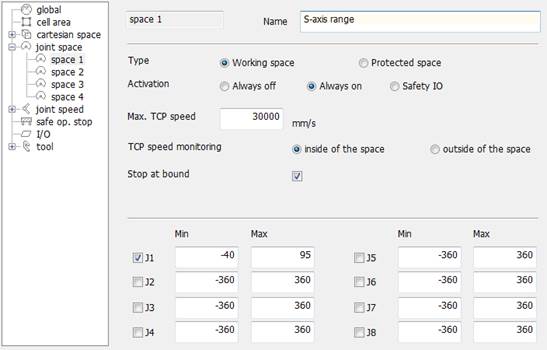
图 8.15 关节空间设置
在此例中,机器人的作用是对工件实施点焊,同时以间歇方式修整毛刺。因此,考虑到工件以及毛刺修整器的布局,机器人 S 轴可限为 -40 至 +95°。将空间 1 设为 S 轴的工作空间。(该关节空间设置未在 HRSpace 三维视图中示出。)
图 8.14 机器人在 S 轴值为 +95°(左侧)和 -45°(右侧)时的姿势
图 8.15 关节空间设置