8.2.5. 工具
8.2.5. 工具
在此例中,电焊枪为工具 0 (T0)。其周围必须被一组球体包围。当其中一个或多个球体与保护区域或单元区域外侧产生交叉时,SafeSpace 会将此种情况视为碰撞。在此例中,我们设置了 3 个球体来包围 T0 以及机器人手腕。(使用工具坐标系。)
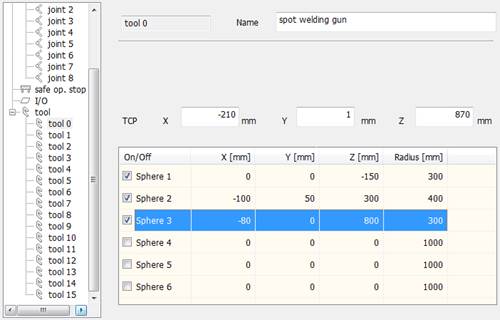
图 8.12 工具 0 设置
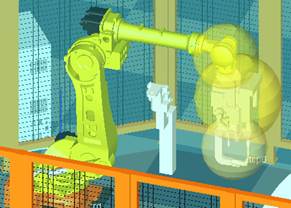
图 8.13 HRSpace 三维视图中的工具 0 球体
在此例中,电焊枪为工具 0 (T0)。其周围必须被一组球体包围。当其中一个或多个球体与保护区域或单元区域外侧产生交叉时,SafeSpace 会将此种情况视为碰撞。在此例中,我们设置了 3 个球体来包围 T0 以及机器人手腕。(使用工具坐标系。)
图 8.12 工具 0 设置
图 8.13 HRSpace 三维视图中的工具 0 球体