7.3.1. 工具数据
7.3.1. 工具数据
设置机器人R1轴凸缘相对于TCP(工具中心点)的距离和角度、记录重心和惯量。用户可以手动输入此项。
采用其他设置方法时、工具的长度可以利用“自动校准”功能设置、工具的重量和重心、惯性可以通过负荷测定功能登记。
进行示教之前、必须正确设置工具距离和角度。这是因为在直线和弧线插值期间会根据TCP产生路径。
Hi5a控制器是根据机器人动力学来控制的。必须精确设置工具的重量、惯量和中心才能保证机器人快速而安全地运行。如果这些值不正确、会使机器人的性能和寿命产生严重问题。
尤其是在使用工具变更功能时、分配分离工具号时不仅要注意工具分离时的状态、还要注意为各工具输入的信息、将此工具信息用到工具变更功能中。
并且,在Handling作业中也应该在各个工具编号上分配拆卸状态,加以使用。
工具长度是凸缘坐标系中每个方向的长度、如下所示。
(1) X轴的距离:Xt
(2) Y轴的距离:Yt
(3) Z轴距离 :Zt
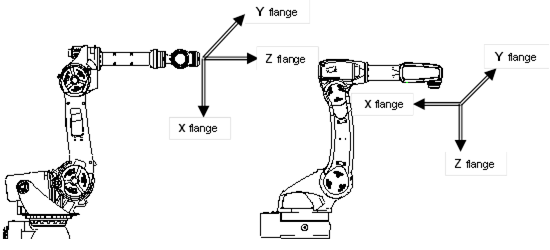
图 7.55 相对于机器人类型的凸缘坐标系
工具角度是凸缘坐标系中每个方向上位置改变的总量。
(1) X 轴角度:Rx
(2) Y 轴角度:Ry
(3) Z 轴角度:Rz
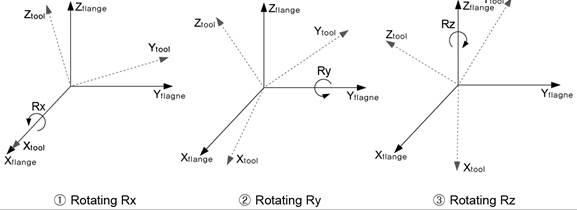
图 7.56 工具角度
因此、要根据凸缘坐标设置工具距离和角度。在凸缘坐标中心和TCP之间设置工具距离。
工具位置是根据设置的工具角度、X、Y和Z轴方向相对于工具凸缘坐标的旋转值。

Rxyz = Rot(z、Rz)Rot(y、Ry)Rot(x、Rx)
Rxyz 是基于工具凸缘的工具位置旋转矩阵
Rot(z、Rz)是由Rz到凸缘坐标的Z轴方向变换而来的旋转矩阵
Rot(y、Ry)是由Ry到凸缘坐标的Y轴方向变换而来的旋转矩阵
Rot(x、Rx)是由Rx到凸缘坐标的X轴方向变换而来的旋转矩阵。

图 7.57 工具数据设置画面
n 重量(Kg):工具的重量
n 角度(度):您可以使用工具角度、自动常数设置或『[F2]:角度校准』功能。
n 长度(mm):您可以使用工具距离、自动常数设置或『[F1]:自动校准』功能。
n 惯量(Kgm2):您可以使用用于工具坐标的工具惯量负载计算功能。
n 中心(mm):您可以根据凸缘中心使用工具的中心位置和负载计算功能。
n 允许比率(限高负荷模式应用机器人型号)
标示基准允许值对比当前设置的比率。 根据允许比率机器人运作如下。 (允许比率可以根据机器人型号和控制器软件版本变更。)
| 正常 | 高负荷模式 | 不能重启 |
重量比率(%) | ~100 | 100 ~ 110 | 110 ~ |
矩量比率(%) | ~100 | 100 ~ 120 | 120 ~ |
惯性比率(%) | ~100 | 100 ~ 130 | 130 ~ |

l 未推测负荷的工具编号上端标示‘(x)’。(上图的T0等)
使用未推测负荷的工具时,可能会在机器人的速度或耐久性上引发问题,所以必须在推测负荷后使用。
l 移动光标或输入角度或距离项数据时、可能在指南框中提示您“请咨询工程师”信息。使用 『[F1]:自动校准』或『[F2]:角度校准』键。请参考以下有关自动校准和角度校准的详情。
l 自动校准
① 如果您定位新工具、以将步位置设置到现有步之处、然后计算新工具的距离和角度。
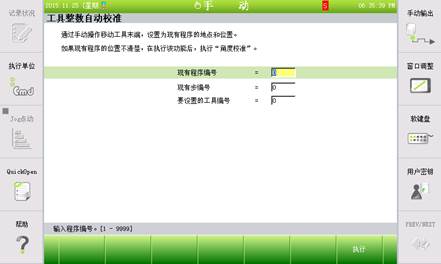

图 7.58 自动工具数据矫正画面
n 现有程序编号:更改工具以前输入示教的程序编号。
n 现有步编号:输入步编号以执行工具常数自动校准。
n 要设置的工具编号:输入新设置的工具编号。
② 您可以用自动常数校准功能方便地生成工具数据、还能够直接使用原来的程序。
l 角度校准
设置工具角度和校准。
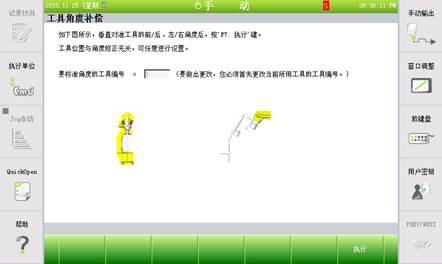
图 7.59 工具角度校准画面
l 复制
把选择的工具数据复制到下一工具的功能。 复制工具数据时,负荷推测数据也一起复制。 该功能仅可在执行负荷推测的工具编号Tab上执行。 用户随意变更的工具的情况,用把重量变更为负荷推测值的‘推测值’按钮变更。

图 7.60 工具角度校准画面