2.1. 用户环境设置
2.1. 用户环境设置
是机器人末端所承受的负荷的总重量、单位是kg。
设置附加轴的更换环境。
『[F2]: 系统』→『4: 应用参数』→『11: 更换伺服工具』→『1: 用户环境设置』
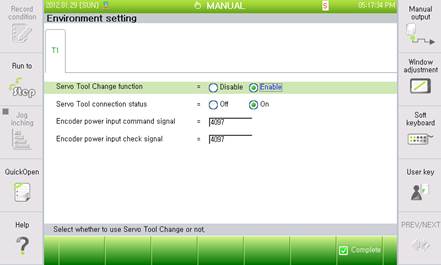
图 2.1 伺服工具更换用户环境设置
(1) 伺服工具更换功能
设置是否使用附加轴的更换功能。
(2) 伺服工具连接状态
监控当前伺服工具的连接或分离状态。且在当前连接伺服工具的状态下可强行分离、在电机Off 状态下变更为<Off>后、重新接通控制器电源即可。与之相反、在分离伺服工具的状态下无法强行进行连接。
(3) 接入编码器电源的输出信号
在进行连接或分离时为控制编码器电源而分配输出信号、该信号在On状态下、控制编码器5V电线的继电器将被启动。
(4) 接入编码器电源的输入信号
在进行连接或分离时为确认编码器电源的控制状态而分配输入信号、确认控制编码器5V电线的继电器动作与否。
参考事项)
l 输出入信号的原理可在『[F2]: 系统』→『2: 控制参数』→『2: 输出入信号设置』→『1: 输入信号属性』/『2: 输出信号属性』进行设置。
l BD530的TBIO信号可各以4097~4100号进行设置。
l 在机器人程序、TBIO信号各对应为SI[101~104]/SO[101~104]。