2.8. 变位机(positioner)校准(calibration)指令(PosiCal)
2.8. 变位机(positioner)校准(calibration)指令(PosiCal)
变位机(positioner)为了与机器人进行同步动作而执行必要的变位机(positioner)校准(calibration)的指令。一般来讲、变位机(positioner)校准(calibration)通过设置对话框来执行、但由于更换伺服工具而变更变位机(positioner)时、在机器人运行中也应变更校准(calibration)。在机器人程序上执行上述操作的指令就是变位机(positioner)校准(calibration)指令(PosiCal)。
(1) PosiCal指令
表 2.3 PosiCal指令参数
PosiCal Prog=<校准(calibration)程序号>、Station=<Station号> | ||
校准(calibration)程序号 | 1~9999 | 变位机(positioner)校准程序号 |
Station 号 | S1~S3 | 拟进行校准的station号 |
(2) 变位机(positioner)校准(calibration)使用例示
- 连接拟进行校准(calibration)的变位机(positioner)和机器人。
- 制作变位机(positioner)校准(calibration)程序。
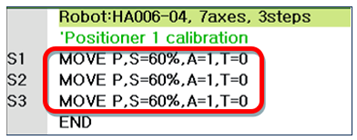
图 2.6 轴变位机(positioner)校准(calibration)程序
- 选择『输入命令』→『弧焊』→『PosiCal』后输入PosiCal指令后运行。或进入『[F2]: 系统』→『6: 自动常数设置』→『2: 变位机(positioner)校准(calibration)』对话框以制作的程序实施变位机(positioner)校准(calibration)。
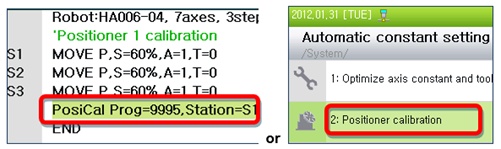
图 2.7 实施变位机(positioner)校准(calibration)
- 通过附加轴同步JOG动作确认变位机(positioner)同步动作是否正常。
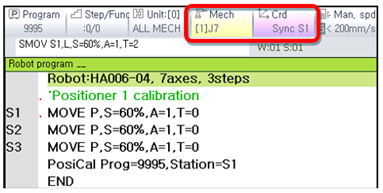
图 2.8 变位机(positioner)同步时的TP画面
- 确认变位机(positioner)旋转时机器人是否准确实施同步动作
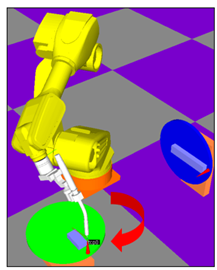
图 2.9 确认变位机(positioner)同步动作
- 在实际作业程序中以TOOLCHNG指令变更变位机(positioner)后执行PosiCal
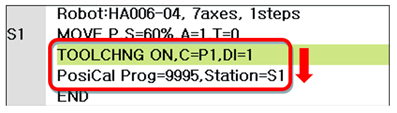
图 2.10 更换工具后实施变位机(positioner)校准(calibration)的例示