10.4.3.11. RINTA
10.4.3.11. RINTA
作为目标步骤、机器在移动过程中由外部感应器模拟电压可满足用户设置的范围时、产生中断并停止机器运行、在执行完步骤中记录的指令之后、移向下一个步骤。
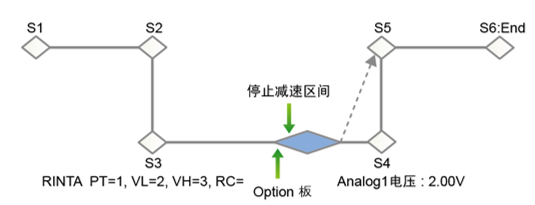
图10.8 机器中断(模拟信号)
说明 | 机器中断(模拟信号) | ||
语法 | RINTA PT=<端口编号>、VL=<下限电压>、VH=<上限电压>、RC=<基准值设置>、[X=<基准X>、Y=<基准Y>、Z=<基准Z>] | ||
参数 | 端口编号 | 用于接收中断信号的模拟端口编号 | 1~32 |
下限电压 | 模拟值处于下限电压和上限电压之间时产生中断现象. | -10.0~10.0 | |
上限电压 | |||
基准值设置 | 0为常规机器中断、1为搜索功能。请参考SEA(搜索)功能。 | 0,1 | |
基准X、Y、Z | 用于搜索功能。 RC=0忽略 | -3000.0~3000.0 | |
使用实例 | RINTA PT=1, VL=2, VH=9, RC=0, X=0, Y=0, Z=0 ← X, Y, Z忽略 RINTA PT=1, VL=2, VH=9, RC=1, X=1000, Y=2000, Z=3000 | ||