10.4.3.5. SEA
10.4.3.5. SEA
搜索功能可检测出作业对象位差、并可修正其位差的功能。不仅是机器坐标、工具坐标或基础坐标基准也可以检测位差、并进行修正。
说明 | 搜索功能 | ||
语法 | SEA ST=<On/Off>、CRD=<参考坐标>[、<用户坐标号>]、R=<注册表编号> | ||
参数 | On/Off | 1为On、0为Off | 0~1 |
参考坐标 | 0=基、1=机器人、2=工具、3=用户、4=用户n | 0~4 | |
用户坐标号 | 使用参考坐标时的用户坐标号 | 0、1~10 | |
注册表编号 | 用于在线Shift的注册表编号 | 1~8 | |
使用实例 | SEA ST=1、RF=0、R=1 | ||
(1) 指定搜索范围。(在『[F7]:条件设置』菜单中、『[F1]:应用条件』→『2:搜索范围』)
(2) 示教程序、记录示教所需的搜索功能。
① 开始搜索
② 机器中断(RINT或RINTA)
③ 搜索完成
④ 在线Shift
(3) On启搜索基准位置数据记录功能。(在『[F7]:条件设置』菜单中、『[F1]:应用条件』→『1:搜索参考位置记录』)
(4) 在1循环模式中运行、通过机器中断读出作业对象的基准位置。
(5) 关闭搜索基准位置数据记录功能。在(『[F7]:条件设置』菜单当中『[F1]:应用条件』→『1:搜索参考位置记录』)
(6) 常规运行。

l 搜索功能的应用
① 1D搜索
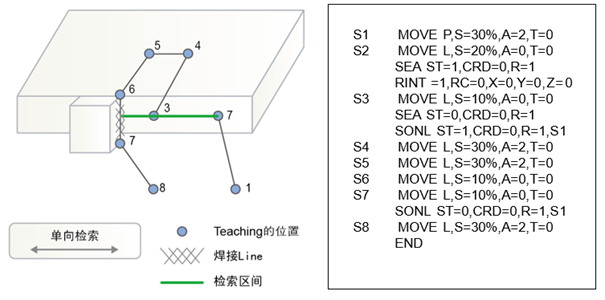
上图中、在相同的作业对象移动或形式相同、大小有差异时、通过单向搜索功能修正误差。
搜索功能如上图所示、与机器中断同时使用。Shift量记录在Shift册表中后、通过在线Shift功能修正其差异。
在图中、根据步骤3的位置、产生机器中断并将Shift量记录在Shift注册表中。参照该Shift注册表后、运行步骤4-步骤7。除此之外、机器中断功能仅允许以直线插值和圆弧插值记录的步骤当中同时使用。
② 平面搜索
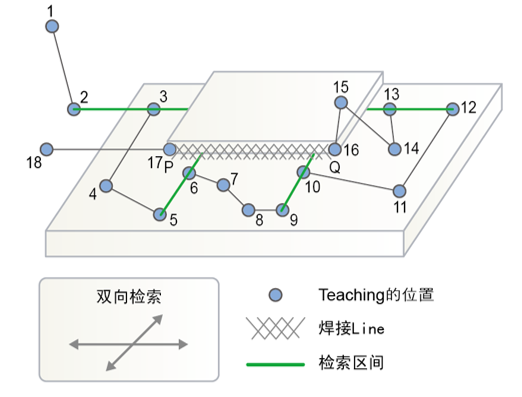
图 10.6 平面 搜索
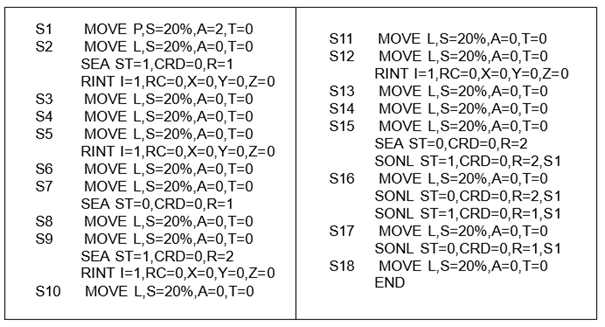
双向检索、可采用2次搜索功能并记录各个点(P、Q)的Shift量。这时、P点的Shift量保存在R1注册表中、在P点移动时作参照。Q点的Shift量保存在R2注册表中、在Q点移动时作参照。