10.4.3.9. TONL
10.4.3.9. TONL
如果3个参考步骤的新位置是用外部检测设备(RS232C端口)测得的、如图10.7中所示的视觉设备、且各位移均传输到了机器人控制器中、则机器人控制器将使用3个参考点和3个位移点来计算绝对位置或位移。本功能用于对TONL起始和结束之间的各步执行位置校准。
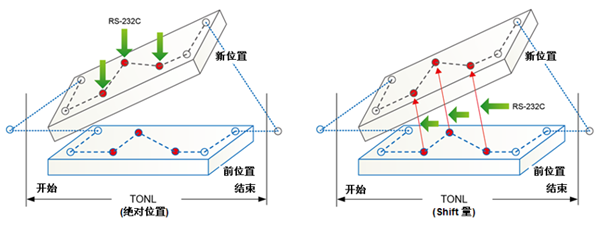
图10.7 在线坐标转换
说明 | 在线坐标转换(Shift量) | ||
语法 | TONL SFT=< 接收格式>、ST=<开始/结束>、<基准步骤编号1>、<基准步骤编号2>、<基准步骤编号3> | ||
参数 | 接收格式 | 数据接收格式。0=绝对坐标、1=位移 | 0~1 |
开始/结束 | 为1时、开始转换坐标、为0时则结束. | 0~1 | |
基准步骤编号 | 指定为基准3点的步骤编号. | 0~999 | |
使用实例 | TONL SFT=0、ST=1、S1、S5、S7 | ||
备注 | 为了执行该项功能、在TONL指令之前必须执行SREQ指令。 本功能用于接收3个参考步的新位置(3个绝对位置或位移)以计算位移。 | ||