2.3.5. 向前/向后步进
2.3.5. 向前/向后步进
向前/向后步进是指播放手动模式记录的程序。利用向前/向后步进功能在安全的速度范围内能够确认已经记录的程序路径和相互的连锁装置关系。
在向前/向后步进根据执行单位总共有3种模式。
执行单位Cmd:每一行执行程序
执行单位Step:每一步执行程序
执行单位End:到END指令执行程序
执行单位设置为Cmd和Step的话、机器人忽视被设置的Accuracy领域、到达记录好的步骤、但是设置为End的话、跟自动模式的播放相同的路径操作。
在Cmd/Step模式执行向前/向后步进的时候、正如下图在没有拐弯的路径上机器人操作。关于拐弯的详细内容、请参考7.3.6. Accuracy项目。
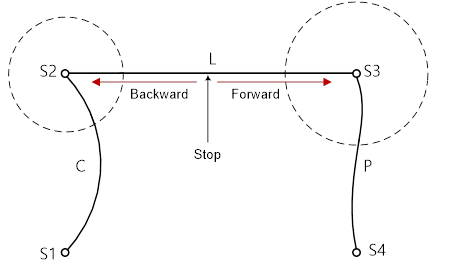
图 2.24 Cmd/Step播放向前/向后步进路径
在End模式执行向前/向后步进的话、正如下图根据停止位置、机器人路径发生变化。也就是说、机器人在不是拐弯的其他地方停止以后向前步进的话、恢复原来的拐弯路径、但是向后步进的话移动到记录好的步骤、这时在记录的步骤上停止后立即移动到以前步骤。机器人在拐弯停止后向前/向后步进时都维持以前的拐弯路径。但是、向后步进的话、机器人在拐弯开始地点自动停止、这时在TP的相关步骤左边表示为“a”(以下参考TP画面)。
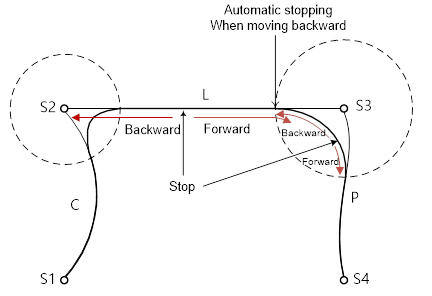
图 2.25 End播放向前/向后步进路径
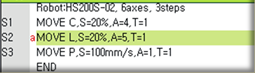
图 2.26 向后步进后前进时机器人路径的例子
在拐弯停止后执行向前步进的话、机器人沿着原来的拐弯路径操作。在再次向后步进的时候尚未到达以前步骤的状态下再次执行向前步进的话、正如下图不能形成原来的拐弯路径。也就是说、步骤的距离小于原来的距离、无法满足原有的Accuracy条件、拐弯路径比原来的拐弯路径更小。
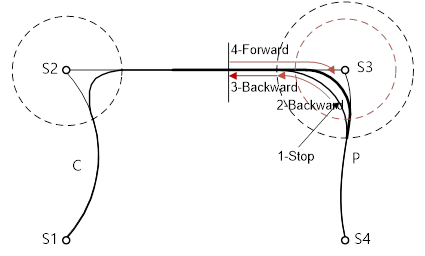
图 2.27 向后步进后前进时机器人路径的例子
在条件设置菜单能够设置“向前/向后步进最大速度”和“向前/向后步进期间的功能”的执行状态。
向前/向后步进最大速度跟手动速度的设定值相同。
向前/向后步进期间的功能设置有Off、On、I On的3种方式。
Off : 不执行向前/向后步进期间的功能。
与外部I/O条件毫无关系、只能确认机器人路径。
由于不操作与外部系统的连锁装置、应予以注意。
On : 执行所有功能。
完成外部连锁装置后使用。
I On : 只执行输入待机功能。
需要确认外部连锁装置安全的时候使用。