7.3.10. 点动等级设置
7.3.10. 点动等级设置
此功能可指定手动模式中点动操作的运动。此功能用于将运动限制在设置范围之内。这对于控制所需距离中的点动运动是有效的。
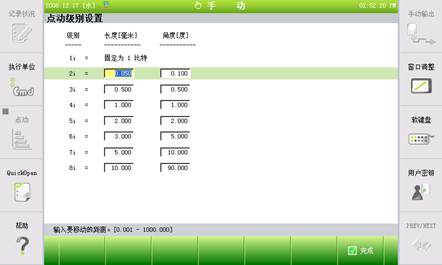
图 7.42 点动等级设置画面
表 7‑2 作业点动功能规格
主要功能 | 备注 |
点动启用坐标 | 轴、矩形、工具、用户 |
点动距离速度等级 | 8 |
n 支持联合坐标的点动:如果您选择轴坐标、您可以将运行范围控制在各轴的设定范围之内。
n 支持笛卡尔坐标的点动
如果您选择笛卡尔坐标、您可以通过指定笛卡尔坐标的X、Y和Z位置(毫米)以及Rx、Ry和 Rz位置(度)来控制距离。
n 支持工具坐标的点动
如果您选择工具坐标、您可以通过指定工具坐标的X、Y和Z位置(毫米)以及Rx、Ry和Rz 位置(度)来控制距离。
n 支持用户坐标的点动
如果您选择用户坐标、您可以通过指定用户坐标的X、Y和Z位置(毫米)以及Rx、Ry和Rz 位置(度)来控制距离。
n 点动等级
如果您将点动距离的等级设置成与现有8个等级的作业速度的等级相同。您可以为各级设置点动距离。
n 点动操作
① 如果您按此按键时间较长、超出到达点动距离的时间、即使按住点动按键、也会减速到达点动距离并停止、如下所示。
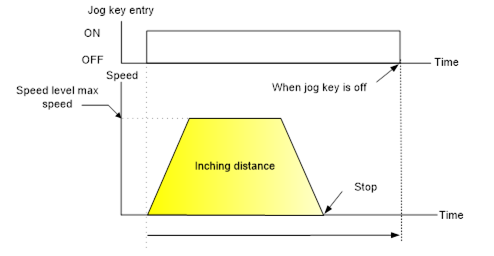
图 7.43 达到点动距离后释放按键时的机器人动作
② 如果在到达点动距离之前释放此按键、将从释放位置减速并停止、如下所示。这与常规点动模式的情况相同。
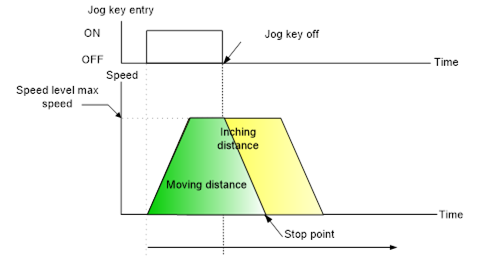
图 7.44 达到点动距离之前释放按键时的机器人动作
③ 点动功能限制每次推动的最大距离、如上图所示。
n 其它
当轴坐标系中的速度等级是1时、会使编码器固定为每次移动1位。