7.3.5. B轴未使用区域
7.3.5. B轴未使用区域
设置B轴的死区。在B轴的0度位置、R1和R2的中心旋转轴几乎平行。但是当机器人的TCP必须移动(例如执行或弧线运动)时、稍稍移动一下都会导致到腕部轴的移动中断。
机器人的轨迹需要利用插值操作通过B轴未使用区域的话进行故障处理后停止机器人。
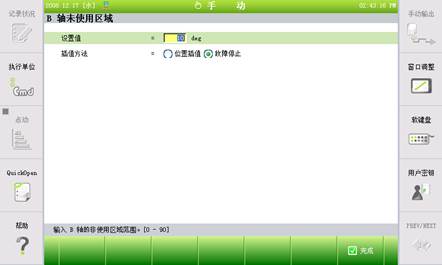
图 7.35 B轴未使用区域设置画面
n 设置值:输入B轴死区的角度。
设置B轴的死区。在B轴的0度位置、R1和R2的中心旋转轴几乎平行。但是当机器人的TCP必须移动(例如执行或弧线运动)时、稍稍移动一下都会导致到腕部轴的移动中断。
机器人的轨迹需要利用插值操作通过B轴未使用区域的话进行故障处理后停止机器人。
图 7.35 B轴未使用区域设置画面
n 设置值:输入B轴死区的角度。