4.3.5.6. BD558T (Hi5a-T控制器一体型驱动装置)
4.3.5.6. BD558T (Hi5a-T控制器一体型驱动装置)
驱动装置(Drive Unit)是根据伺服板发出的电流指令、执行向马达各相传送电流的功率放大功能。6轴一体型驱动装置(Drive Unit)可同时驱动6个马达,其构成如下:
二极管模块转换器与伺服放大器是一体型,并以二极管模块对从电装模块供应的3相电流进行整流,变成直流,保存到平滑电容器中。机器人减速时,从发动机上发生的电力连通晶体管和电阻来加以消耗,其构成如下:
表 4‑66 BD558T(Hi5a-T 6轴一体型驱动装置)的构成
构成元件 | 功能 | |
BD558T (一体型板) | 逻辑电路板 | 将从伺服板接收的PWM信号分离为IPM上端/下端驱动信号,并执行错误处理。 |
门驱动模块 | 生成IPM门信号 | |
门电源模块 | 生成门电源 | |
电流检测部分 | 检测出马达上流过的电流 | |
整流部分 | 生成从交流电源供应给发动机的直流电源 | |
回生控制 | PN电压上升时使IGBT驱动 | |
错误检测部分 | 检测出过电压、回生电阻过热、电涌输入错误 | |
控制电源部分 | 生成控制电源(: 5V,±15V) | |
Pre-Charge部分 | DC电源平滑电容器保护专用电源时序部分 | |
其他零件 | 散热板(Heat Sink) | 将从电子元件中产生的热量散发到外部 |
IPM | 交换设备 | |
电容器 | 平滑直流电源 | |
回生IGBT | 执行回生控制 | |
回生电阻 | 消耗回生电源 | |
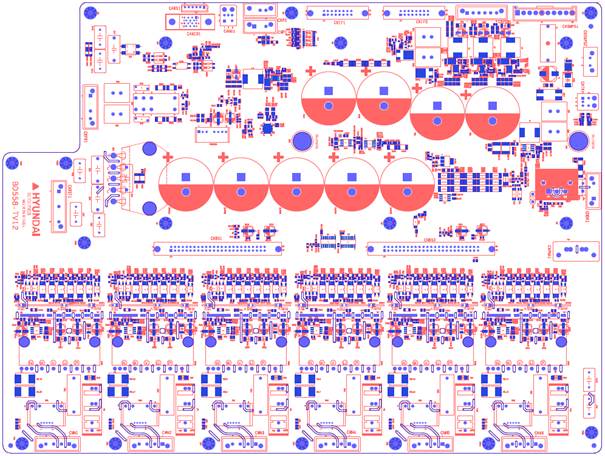
图4.62 BD558T 零件配置图
表 4‑67 BD558 连接器说明
名称 | 用途 | 连接外部设备 |
CNRST1 | 输入220V 3相(: R,S,T)电源 | Magnetic Connector |
CNPR1 | 输入220V 单相(: R,T)电源 | Magnetic Connector |
CNM1~6 | 电源PWM输出 | 各轴马达3相 |
CNBS1~2 | PWM信号、错误信号、门电源供应 | 伺服板(BD544)接口 |
CNPNA1 | 供应附加轴电源 | 附加轴AMP |
CNDR1 | 连接回生电阻 | 回生电阻 |
CNSMPS1 | 输入外部SMPS电源 | 外部SMPS |
CNSMPS2 | 供应序列板(sequence board)电源 | 序列板(BD567T) |
CNP1 | 供应外部电源(24V) | - |
CNP2 | 供应外部电源(5V) | - |
CNPOW1 | 供应控制电源(5V,±15V) | 背板(BACK PLANE BOARD) |
CANIO1 | CAN通信2PORT,运行序列信号 | 主板(BD511) |
CANS1 | CAN通信 1PORT | - |
CANU1 | 外部CAN通信 1PORT | - |
CNIF1 | 运行序列信号 | 序列板(BD567T) |
CNIF2 | 运行序列通信信号 | 序列板(BD567T) |
表4‑68 Hi5a-T 6轴一体型驱动装置的型式标记
分类 | 型式标记 |
私服驱动器(Servo Drive) | BD558T/ BD558T-S |
表4‑69 Hi5a-T 6轴一体型驱动装置的规格
构成 | 分类 | 适用 | ||
IPM容量 | 3A | 3B | HH4, HH4L, HH7, HH8 | 6轴一体型 |
年度 | 00 ~ 99 | 生产年度 :2000年 ~ 2099年 | ||
月 | 01 ~ 12 | 生产月份 :1月~12月 | ||
序列号 | 001 ~ 999 | 月生产量 :1 ~ 999台 | ||
表4‑70 Hi5a-T IPM容量
小型 | A | (IPM额定电流)50A, (Hall Sensor额定电流) 4V/15A |
B | (IPM额定电流)20A, (Hall Sensor额定电流)4V/5A |
表4‑71 Hi5a-T IPM专用Hall Sensor标记
Drive Model | Hall Sensor标记(规格) | Full Scale电流(Im) | IPM规格(额定电流) |
小型 伺服驱动器 | 3 (4V/15A) | 28.12Apeak | PSS50S71F6 (50A) PSS20S71F6 (20A) |
5 (4V/5A) | 9.37Apeak |
表4‑72 Hi5a-T 6轴一体型回生IGBT规格
回生IGBT | z | 可适用60A, 回生电阻20Ω(150W,1EA) |
表4‑73 Hi5a-T 6轴一体型电解电容器规格
电解电容器 | 5c | 470uF 5EA |
* IPM, Hall Sensor, IGBT, 电解电容器须使用Hi5a-T控制器专用零件
| 注意: 由于驱动装置岁机器人的不同而不同,因此在更换时一定要确认其型式。 |
