10.5.3.24. CalXLine
10.5.3.24. CalXLine
说明 | 计算由两点组成的直线和由另外的两点组成的直线以最短距离聚集的第一个直线上的点。 | ||
语法 | CalXLine<直线参考姿势1>、<直线参考姿势2>、<直线参考姿势3>、<直线参考姿势4>、 <结果姿势> | ||
参数 | 直线参考姿势1 | 要计算第一个直线的第一个参考姿势 | |
直线参考姿势2 | 要计算第一个直线的第二个参考姿势 | ||
直线参考姿势3 | 要计算第二个直线的第一个参考姿势 | ||
直线参考姿势4 | 要计算第二个直线的第二个参考姿势 | ||
结果姿势 | 以最短的距离连接两个直线的直线和第一个直线交叉的姿势 | ||
例子 | CalXLine P1,P2,P3,P4,LP1
| ‘将以最短的距离连接由P1、P2组成的直线和由P3、P4组成的直线的直线与第一个直线交叉的姿势代入LP1’ | |
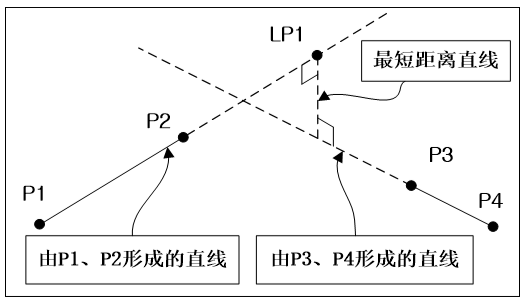
图 10.15 CalXLine例子

l 跟弧焊功能的触摸传感一起使用、设置用户坐标时使用的话更好。