10.5.3.5. SEA
10.5.3.5. SEA
搜索功能可检测出作业对象位差、并可修正其位差的功能。不仅是机器坐标、工具坐标或基础坐标基准也可以检测位差、并进行修正。 该命令在机器人移动中因检测信号停止,将其与标准位置比较,用于计算Shift量。 如此计算的Shift量可以利用在线Shift命令,应用于既存作业位置的统一变更。 本命令应与RINT/RINTA、SONL命令一起使用,才能获得想要的搜索及运作功能。 而且,搜索标准位置及范围的设置应在『[F7]:条件设置』 à 『[F1]:应用条件』菜单上设置。
说明 | 搜索功能 | ||
语法 | SEA ST=<On/Off>、CRD=<参考坐标>[、<用户坐标号>]、R=<注册表编号> | ||
参数 | On/Off | 1为On、0为Off | 0~1 |
参考坐标 | 0=基、1=机器人、2=工具、3=用户、4=用户n | 0~4 | |
用户坐标号 | 使用参考坐标时的用户坐标号 | 0、1~10 | |
注册表编号 | 用于在线Shift的注册表编号 | 1~8 | |
使用实例 | SEA ST=1,RF=0,R=1 | ||
(1) 指定搜索范围。(在『[F7]:条件设置』菜单中、『[F1]:应用条件』→『2:搜索范围』) 从Step2号移动到Step3号,并在搜索的情况下,范围如下图所示。

(2) 示教程序、记录示教所需的搜索功能。
① 追加搜-索开始命令语(ST=1)
② 机器中断(RINT或RINTA)(设置中断输入信号,输入RC=1)
X, Y, Z记录搜索标准位置时会自动更新,所以不需要设置。
③ 机器人移动Step记录
④ 追加搜-索结束命令语(ST=0)
⑤ 追加在线Shift
⑥ 执行需要Shift的作业
⑦ 结束在线Shift
(3) On启搜索基准位置数据记录功能。(在『[F7]:条件设置』菜单中、『[F1]:应用条件』→『1:搜索参考位置记录』)
(4) 在1循环模式中运行、通过机器中断读出作业对象的基准位置。
该位置值记录在以前执行的RINT/RINTA命令的X, Y, Z项目上。
(5) 关闭搜索基准位置数据记录功能。在(『[F7]:条件设置』菜单当中『[F1]:应用条件』→『1:搜索参考位置记录』)
(6) 常规运行。
(7) 以后按照检测出的中断位置和标准位置的差异进行Shift,执行作业。

l 搜索区间应以直线补间运作移动才能检测出准确位置。
l 搜索功能的应用
① 1D搜索
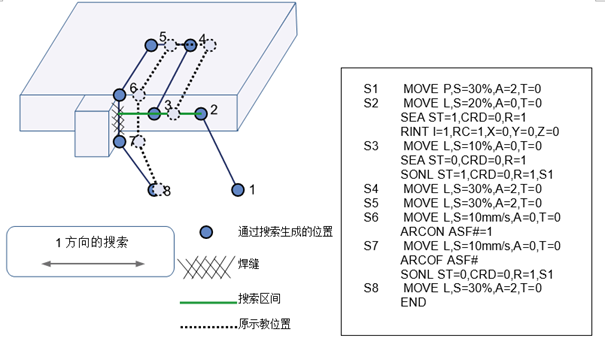
图 10.8 1D 搜索
上图中、在相同的作业对象移动或形式相同、大小有差异时、通过单向搜索功能修正误差。
搜索功能如上图所示、与机器中断同时使用。Shift量记录在Shift册表中后、通过在线Shift功能修正其差异。
移动到Step2号位置后,依靠SEA命令的执行开始执行搜索-功能。 在上图中 RINT命令的X, Y, Z值执行搜索标准位置记录时,更新到实际中断位置。
移动到Step3号位置的同时,按照以‘机器人搜索范围’设置的范围检测中断。 如果输入中断信号,在RINT命令的 X, Y, Z项目上代入值,或(标准位置记录模式ON的情况)与X, Y, Z项目比较,生成Shift量后,代入在搜索命令上设置的编号的Shift寄存器。(标准位置记录模式OFF的情况)
参考该Shift寄存器,Shift Step4-Step7的程序,进行运作。
② 平面搜索
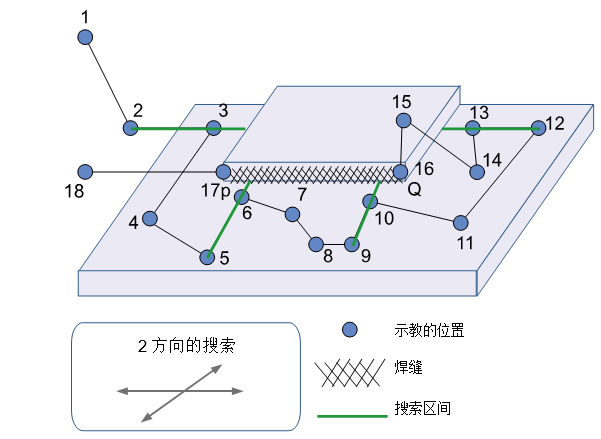
图 10.9 平面搜索
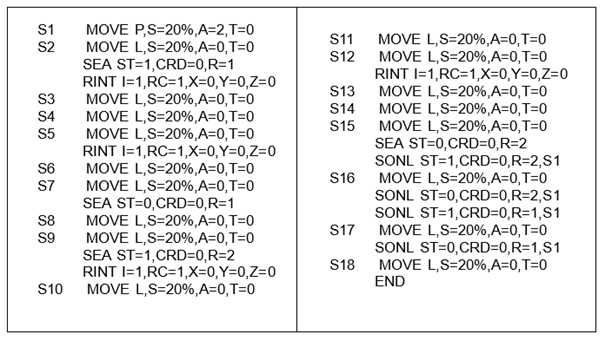
双向检索、可采用2次搜索功能并记录各个点(P、Q)的Shift量。这时、P点的Shift量保存在R1注册表中、在P点移动时作参照。Q点的Shift量保存在R2注册表中、在Q点移动时作参照。