10.5.3.9. TONL
10.5.3.9. TONL
如果3个参考步骤的新位置是用外部检测设备(RS232C端口)测得的、如图 10.10中所示的视觉设备、且各位移均传输到了机器人控制器中、则机器人控制器将使用3个参考点和3个位移点来计算绝对位置或位移。本功能用于对TONL起始和结束之间的各步执行位置校准。
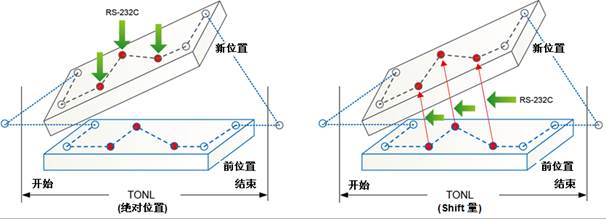
图10.10 在线坐标转换
说明 | 在线坐标转换(Shift量) | ||
语法 | TONL SFT, REF=<基准位置>,MEA=<测量位置>,TOL<允许误差> | ||
参数 | 基准位置 | 旨在计算TONL位置转换关系的基准位置(姿势或Step) |
|
测量位置 | 针对已变更位置的绝对位置(姿势)或相对位置(移位变量) |
| |
TOL | 针对坐标转换结果的允许误差 | 0~200 | |
使用实例 | TONL SFT,REF=S1,S2,S3,MEA=R1,R2,R3,TOL=2.0 | ||
备注 | 就该功能而言,计算出对3个基准位置测量的3点位置之间的关系 | ||

说明 | 在线坐标转换(Shift量) | ||
语法 | TONL 3POS, REF=< 基准位置 >,MEA=<测量位置 >,TOL< 允许误差 > | ||
参数 | 基准位置 | 旨在计算TONL位置转换关系的基准位置(姿势或Step) |
|
测量位置 | 当输入针对已变更位置的绝对位置(姿势/移位变量)移位变量时,也视为绝对位置。 |
| |
TOL | 针对坐标转换结果的允许误差 | 0~200 | |
使用实例 | TONL 3POS,REF=S1,S2,S3,MEA=R1,R2,R3,TOL=2.0 | ||
备注 | 就该功能而言,计算出对3个基准位置测量的3点位置之间的关系 | ||
说明 | 在线坐标转换(Shift量) | ||
语法 | TONL 2POS, REF=< 基准位置 >,MEA=< 测量位置 >,TOL< 允许误差 > | ||
参数 | 基准位置 | 旨在计算TONL位置转换关系的基准位置(姿势或Step) |
|
测量位置 | 针对已变更位置的绝对位置(姿势)或相对位置(移位变量) |
| |
TOL | 针对坐标转换结果的允许误差 | 0~200 | |
使用实例 | TONL 2POS,REF=S1,S2,MEA=R1,R2,TOL=2.0 | ||
备注 | 就该功能而言,以共同垂直于2个基准位置的载体与已测量的2点载体之间的旋转轴为准,计算出转换关系 | ||
说明 | 在线坐标转换(Shift量) | ||
语法 | TONL TFM,<转换关系> | ||
参数 | 基准位置 | TONL转换关系移位变量(R) |
|
使用实例 | TONL TFM,R1 | ||
备注 | 就该功能而言,当已知坐标转换关系时,不计算其他坐标转换关系而直接输入转换关系时,使用该功能。
姿势矩阵则会按 | ||



说明 | 在线坐标转换(Shift量) |
语法 | TONL OFF |
使用实例 | TONL OFF |
备注 | 不再适用TONL功能的坐标转换。 |