7.3.8. 碰撞感应
7.3.8. 碰撞感应
在机器人运行中出现碰撞时,为了最大限度地减少因碰撞引起的损坏,对在机器人运行中正常产生的扭矩与当前产生的扭矩进行比较,若出现异常扭矩,系统就会将其视为错误,这就是“碰撞感应功能”。
Hi5a控制器具备应对机器人在异常条件下运行或异常运行的安全装置,现有的感应功能——针对过电流、过负荷、过速度、位置偏差错误等的感应功能,与碰撞感应功能相结合,提高机器人的安全性。
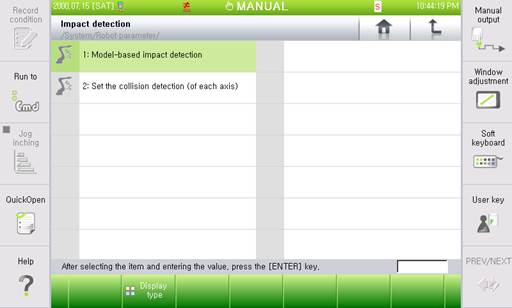
图 7.69 碰撞感应菜单界面
在机器人运行中出现碰撞时,为了最大限度地减少因碰撞引起的损坏,对在机器人运行中正常产生的扭矩与当前产生的扭矩进行比较,若出现异常扭矩,系统就会将其视为错误,这就是“碰撞感应功能”。
Hi5a控制器具备应对机器人在异常条件下运行或异常运行的安全装置,现有的感应功能——针对过电流、过负荷、过速度、位置偏差错误等的感应功能,与碰撞感应功能相结合,提高机器人的安全性。
图 7.69 碰撞感应菜单界面