7.3.8.1. 基于模型的碰撞感应设置
7.3.8.1. 基于模型的碰撞感应设置
就基于模型的碰撞感应功能而言,以动力学(动态)模型为基础,计算出在机器人运行中正常产生的扭矩与实际测量的扭矩之差,由此进行碰撞感应。通过设置灵敏度,可调节针对碰撞的反应性,也可感应机器人以低速运行时与外部接触的情况。具体的使用方法,请参考《Hi5a控制器基于模型的碰撞感应功能说明书》。
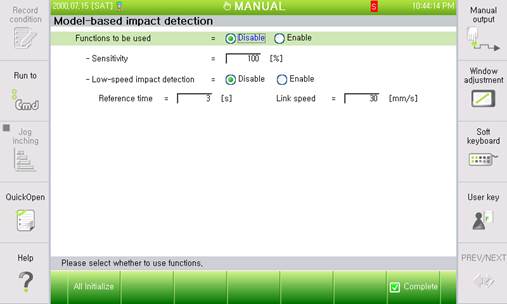
图 7.70 碰撞感应(各轴)设置界面
就基于模型的碰撞感应功能而言,以动力学(动态)模型为基础,计算出在机器人运行中正常产生的扭矩与实际测量的扭矩之差,由此进行碰撞感应。通过设置灵敏度,可调节针对碰撞的反应性,也可感应机器人以低速运行时与外部接触的情况。具体的使用方法,请参考《Hi5a控制器基于模型的碰撞感应功能说明书》。
图 7.70 碰撞感应(各轴)设置界面